Qu’est ce qu’un robot suiveur de ligne ?
Un robot suiveur de ligne est un type de robot industriel utilisé pour suivre une ligne tracée au sol. Ces robots sont souvent utilisés dans l’industrie pour transporter des matériaux d’un endroit à un autre sans intervention humaine directe. Ils peuvent être programmés pour suivre une ligne droite ou une ligne courbe et peuvent également être équipés de capteurs pour détecter les obstacles sur leur chemin.
Le robot suiveur de ligne peut être utilisé dans des applications telles que la surveillance de la qualité dans les usines, la livraison de colis dans les entrepôts, ou même comme jouet pour les enfants.
Le fonctionnement d’un robot suiveur de ligne repose sur des capteurs qui détectent la ligne sur laquelle il doit se déplacer. Ces capteurs peuvent être des capteurs optiques ou des capteurs magnétiques, selon le type de ligne tracée. Le robot utilise ensuite ces données pour ajuster sa vitesse et sa direction afin de suivre la ligne de manière précise.
Les robots suiveurs de ligne offrent de nombreux avantages dans l’industrie, notamment une précision élevée et une efficacité accrue. Ils peuvent également fonctionner de manière autonome pendant de longues périodes, ce qui permet de réduire les coûts de main-d’œuvre. Cependant, il est important de noter que ces robots doivent être régulièrement entretenus et programmés pour garantir leur bon fonctionnement.
Pour construire un robot suiveur de ligne, vous aurez besoin de quelques éléments clés, tels que :
- Des capteurs pour détecter la ligne : Les capteurs peuvent être des photodiodes, des phototransistors, des capteurs infrarouges, ou des capteurs de couleur.
- Des moteurs pour faire avancer le robot : Les moteurs peuvent être des moteurs à courant continu ou des servomoteurs.
- Un microcontrôleur pour contrôler le robot : Un microcontrôleur tel qu’un Arduino ou un Raspberry Pi peut être utilisé pour contrôler les moteurs et lire les signaux des capteurs.
- Une batterie pour alimenter le robot : Le robot aura besoin d’une source d’énergie pour fonctionner, donc une batterie rechargeable est souvent utilisée.
Une fois que vous avez tous les éléments nécessaires, vous pouvez commencer à construire le robot en utilisant des tutoriels en ligne et en expérimentant avec différents algorithmes de suivi de ligne pour trouver celui qui fonctionne le mieux.
Réalisation d’un robot suiveur de ligne commandé par la carte Micro:bit
Le robot suiveur de ligne avec la carte Micro:bit est un projet passionnant qui utilise un microcontrôleur Micro:bit pour suivre une ligne.
Matériaux nécessaires :
La carte Micro:bit
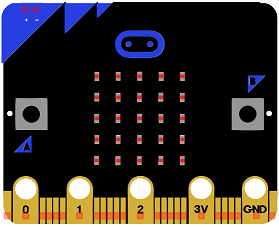
Micro:bit est une carte de développement électronique conçue pour l’apprentissage de la programmation et l’électronique. Elle a été développée par le BBC en association avec plusieurs partenaires industriels pour aider les jeunes à découvrir les sciences de l’informatique et de l’ingénierie.
La carte Micro:bit est petite et légère, ce qui en fait un choix populaire pour les projets de robotique et de développement de produits électroniques. Elle possède une variété de fonctionnalités intégrées telles que des entrées/sorties numériques et analogiques, un accéléromètre, un gyroscope, une LED matrix, un port USB, etc.
La carte Micro:bit peut être programmé en utilisant un ensemble de langages de programmation tels que Python, JavaScript et C++. Il existe également un grand nombre de projets et de tutoriels en ligne pour vous aider à démarrer avec la carte Micro:bit.
En résumé, la carte Micro:bit est un outil puissant pour les enseignants, les étudiants et les passionnés de développement électronique qui souhaitent découvrir les concepts de la programmation et de l’électronique.
Carte DRIVER EXPANSION pour Micro:bit
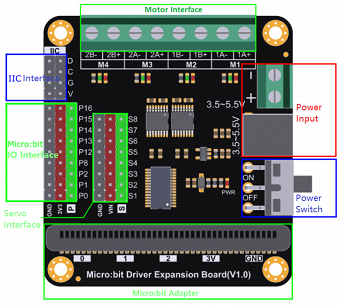
La carte de contrôleur de moteur Micro:bit Driver Expansion est un add-on pour la carte Micro:bit qui permet de contrôler facilement des moteurs DC, des servomoteurs et des moteurs à courant continu. Cette carte ajoute des fonctionnalités supplémentaires à la carte Micro:bit pour vous permettre de créer des projets de robotique plus complexes et plus interactifs.
Avec la carte Driver Expansion, vous pouvez contrôler les moteurs à l’aide d’un simple code en utilisant les entrées/sorties numériques de la carte Micro:bit. Il est également possible de contrôler les moteurs en utilisant des entrées analogiques pour ajuster la vitesse et la direction des moteurs.
La carte Driver Expansion est facile à utiliser et à configurer, ce qui en fait un choix populaire pour les projets de robotique débutants. Il existe un grand nombre de tutoriels et de guides en ligne pour vous aider à démarrer avec cette carte et à utiliser ses fonctionnalités.
En résumé, la carte Driver Expansion pour Micro:bit est un excellent moyen d’ajouter des capacités de contrôle de moteur à votre projet Micro:bit et de créer des robots plus avancés et plus interactifs.
2 Capteurs KY-032
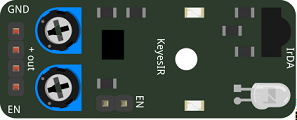
Le capteur KY-032 est un capteur de suivi de ligne infrarouge qui est utilisé dans de nombreux projets de robotique, y compris les robots suiveurs de ligne. Il est facile à utiliser et peut être connecté à divers microcontrôleurs tels que le Micro:bit, Arduino, Raspberry Pi, etc.
Le capteur KY-032 a deux diodes émettrices infrarouges (LED) et deux récepteurs de lumière infrarouge (phototransistors). Les LED émettent une lumière infrarouge qui est réfléchie par la surface sur laquelle le capteur est placé. Les phototransistors détectent la lumière réfléchie et génèrent des signaux électriques. Les signaux électriques sont ensuite lus par le microcontrôleur pour déterminer si le capteur est sur la ligne ou non.
Le capteur KY-032 est généralement utilisé avec deux capteurs ou plus pour détecter les bords de la ligne et pour aider le robot à suivre la ligne avec précision. Les signaux de sortie du capteur KY-032 sont numériques, c’est-à-dire qu’ils peuvent être lus comme des valeurs 0 ou 1, en fonction de la position du capteur sur la ligne.
En bref, le capteur KY-032 est un composant essentiel pour construire un robot suiveur de ligne. Il est facile à utiliser, peu coûteux et peut être utilisé avec une variété de microcontrôleurs.
Batterie de 9V

Une batterie de 9 volts est une pile qui fournit une tension de sortie de 9 volts. Elles sont souvent utilisées dans les appareils électroniques portables tels que les radiodiffuseurs, les jouets et les outils électroniques. Elles sont également couramment utilisées dans les applications de bricolage et de loisir, telles que les circuits électroniques et les projets de robotique.
Fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte Micro:bit. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte Micro:bit afin de créer des circuits électroniques.
Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Les fils de connexion sont généralement fabriqués en cuivre ou en alliage de cuivre et sont revêtus d’un isolant en plastique pour protéger les fils électriques et empêcher les courts-circuits. Ils sont disponibles dans une variété de couleurs pour aider à identifier et organiser les différents fils dans un circuit.
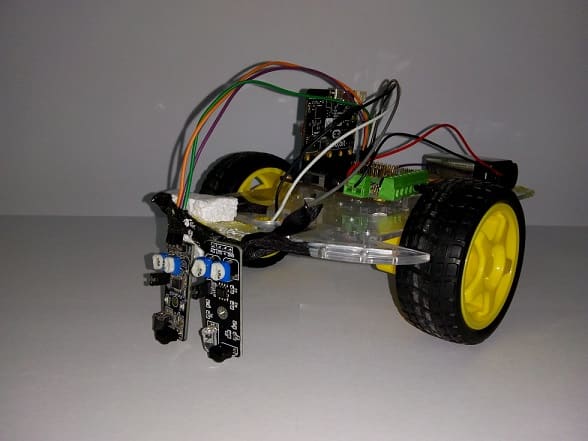
Kit robot voitures de 2 roues

Un kit robot voiture à deux roues est un ensemble de pièces et de composants qui permet de construire un robot mobile à deux roues. Ces kits sont généralement destinés aux débutants en robotique et sont conçus pour être faciles à utiliser et à assembler.
Les kits robot voiture à deux roues comprennent généralement un châssis de robot, des roues et des moteurs pour propulser le robot, ainsi qu’un contrôleur de moteur et un microcontrôleur pour commander le robot. Ils peuvent également inclure des capteurs et des modules de communication pour permettre au robot de naviguer et de détecter son environnement.
Pour utiliser un kit robot voiture à deux roues, il faut d’abord assembler le robot en suivant les instructions du manuel. Une fois le robot assemblé, vous pouvez le programmer pour qu’il effectue différentes tâches, comme suivre une ligne, éviter des obstacles ou se déplacer vers un emplacement précis.
Les kits robot voiture à deux roues sont une excellente introduction à la robotique et peuvent être utilisés pour enseigner la programmation et la robotique de manière interactive et ludique. Ils sont également idéaux pour les projets de loisirs et pour la création de robots de compétition.
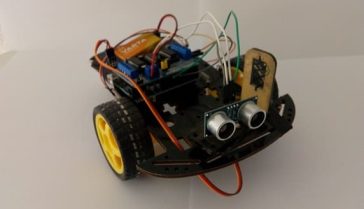
Le kit robot utilisé dans ce projet est composé de :
- châssis de voiture.
- 2 moteurs à engrenages
- 2 pneus de voiture
- 1 roue universelle
Pour assembler les composants du kit robot, vous pouvez voir cette vidéo.
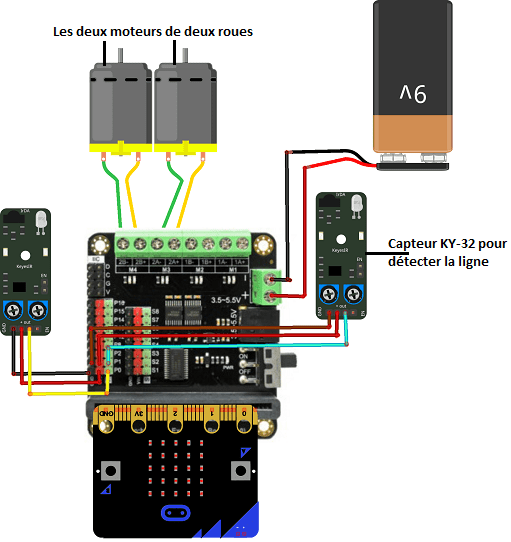
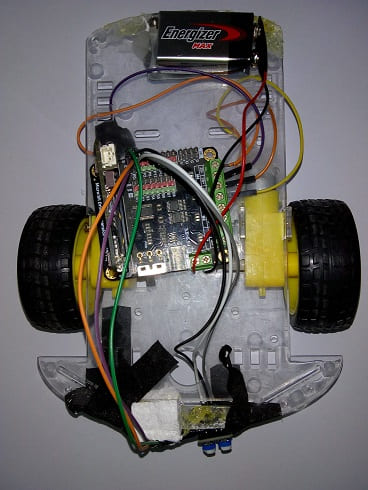
Montage
Pour le premier capteur KY-032 :
- Connecter la broche GND du capteur à la broche GND de la carte Micro:bit
- Connecter la broche + du capteur à la broche 3.3V de la carte Micro:bit
- Connecter la broche OUT du capteur à la broche P0 de la carte Micro:bit
Pour le deuxième capteur KY-032 :
- Connecter la broche GND du capteur à la broche GND de la carte Micro:bit
- Connecter la broche + du capteur à la broche 3.3V de la carte Micro:bit
- Connecter la broche OUT du capteur à la broche P1 de la carte Micro:bit
Connecter le premier moteur au port M3 de la carte Carte DRIVER EXPANSION
Connecter le deuxième moteur au port M4 de la carte Carte DRIVER EXPANSION
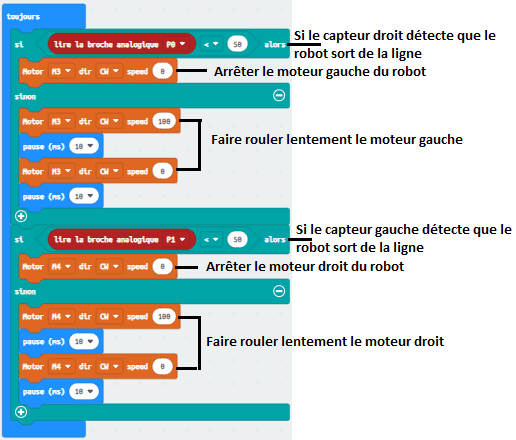
Programme Makecode
On Programme le Micro:bit pour que le robot suive la ligne. on va utiliser l’éditeur en ligne MakeCode pour programmer le Micro:bit en utilisant les blocs de programmation visuels. On doit lire les valeurs des deux capteurs KY-032 pour déterminer si le robot doit tourner à droite ou à gauche pour suivre la ligne.
Une fois le programme terminé, on le télécharge sur le Micro:bit.
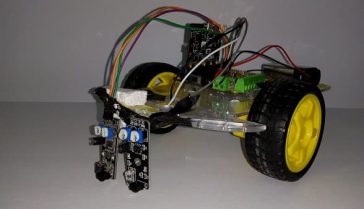
Enfin, on met le robot sur la ligne et testez-le. Vous devriez voir le robot suivre la ligne.
Vous pouvez voir aussi

1 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
Liam 24-08-2323
Hello This is Liam from PCBWay. Deeply impressed by your website content which means a lot to electronic hobbyists. Would your website accept sponsored? Looking forward to your reply.