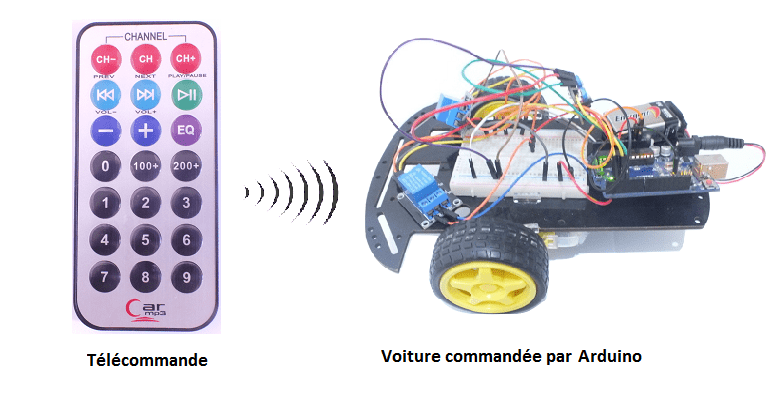
Une voiture télécommandée est un jouet ou un modèle réduit de voiture qui peut être contrôlé à distance via une télécommande. Elles sont généralement alimentées par des piles et peuvent être utilisées à l’intérieur ou à l’extérieur.
Les voitures télécommandées sont souvent utilisées comme jouets par les enfants et les adultes, mais elles peuvent également être utilisées pour des projets de robotique et de modélisme. Elles peuvent être équipées de différents capteurs et de microcontrôleurs, tels qu’une carte Arduino, pour ajouter des fonctionnalités telles que la détection d’obstacles ou la possibilité de suivre une ligne.
But de ce projet:
Il est possible de construire une voiture télécommandée à l’aide d’une carte de développement telle qu’Arduino et de quelques autres composants électroniques.
C’est à dire on va réaliser une voiture télécommandée à distance (par infrarouge) contrôlable par la carte Arduino.
L’utilisateur pourra piloter la voiture par une télécommande dans trois directions (avant, droite et gauche) et l’arrêter.

Composants nécessaires
carte Arduino

Une carte Arduino est une carte de développement électronique basée sur un microcontrôleur. Elle est conçue pour être facilement utilisable par les développeurs et les hobbyistes pour créer des projets électroniques.
Les cartes Arduino sont principalement utilisées pour contrôler des appareils électroniques en utilisant du code informatique, mais elles peuvent également être utilisées pour traiter et afficher des données. Elles sont souvent utilisées dans des projets de robotique, de domotique, de domaine de l’Internet des objets (IoT) et dans de nombreux autres domaines de l’électronique de loisir et professionnelle.
deux relais
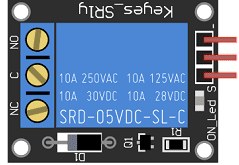
Le relais est est un dispositif électrique qui peut être utilisé pour commander des circuits électriques à l’aide d’un signal électrique de commande.
Le relais est souvent utilisé dans les projets de robotique et de domotique pour contrôler des appareils électriques, tels que des moteurs, des pompes à eau, des lumières et des chauffe-eau. Il peut être utilisé avec une carte Arduino ou tout autre microcontrôleur en utilisant des fils électriques et des connecteurs adaptés.
capteur infrarouge KY-032
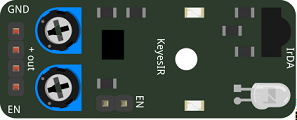
Le capteur KY-032 est un capteur infrarouge (IR) qui peut être utilisé pour détecter la présence d’objets ou de personnes. Il est composé d’un émetteur infrarouge et d’un récepteur infrarouge qui sont montés de chaque côté d’un boîtier en plastique.
télécommande infrarouge

Une télécommande infrarouge (IR) est un dispositif de commande à distance qui utilise des impulsions lumineuses infrarouges pour transmettre des commandes à un appareil cible. Les télécommandes IR sont couramment utilisées pour contrôler des appareils électroniques tels que les téléviseurs, les lecteurs DVD, les décodeurs et les appareils de domotique.
Kit robot voitures de 2 roues

Un kit robot voiture à deux roues est un ensemble de pièces et de composants qui permet de construire un robot mobile à deux roues. Ces kits sont généralement destinés aux débutants en robotique et sont conçus pour être faciles à utiliser et à assembler.
Les kits robot voiture à deux roues comprennent généralement un châssis de robot, des roues et des moteurs pour propulser le robot, ainsi qu’un contrôleur de moteur et un microcontrôleur pour commander le robot. Ils peuvent également inclure des capteurs et des modules de communication pour permettre au robot de naviguer et de détecter son environnement.
Pour utiliser un kit robot voiture à deux roues, il faut d’abord assembler le robot en suivant les instructions du manuel. Une fois le robot assemblé, vous pouvez le programmer pour qu’il effectue différentes tâches, comme suivre une ligne, éviter des obstacles ou se déplacer vers un emplacement précis.
Les kits robot voiture à deux roues sont une excellente introduction à la robotique et peuvent être utilisés pour enseigner la programmation et la robotique de manière interactive et ludique. Ils sont également idéaux pour les projets de loisirs et pour la création de robots de compétition.
Le kit robot utilisé dans ce projet est composé de :
- châssis de voiture.
- 2 moteurs à engrenages
- 2 pneus de voiture
- 1 roue universelle
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques. Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Les fils de connexion sont généralement fabriqués en cuivre ou en alliage de cuivre et sont revêtus d’un isolant en plastique pour protéger les fils électriques et empêcher les courts-circuits. Ils sont disponibles dans une variété de couleurs pour aider à identifier et organiser les différents fils dans un circuit.
Plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
Construction de la voiture
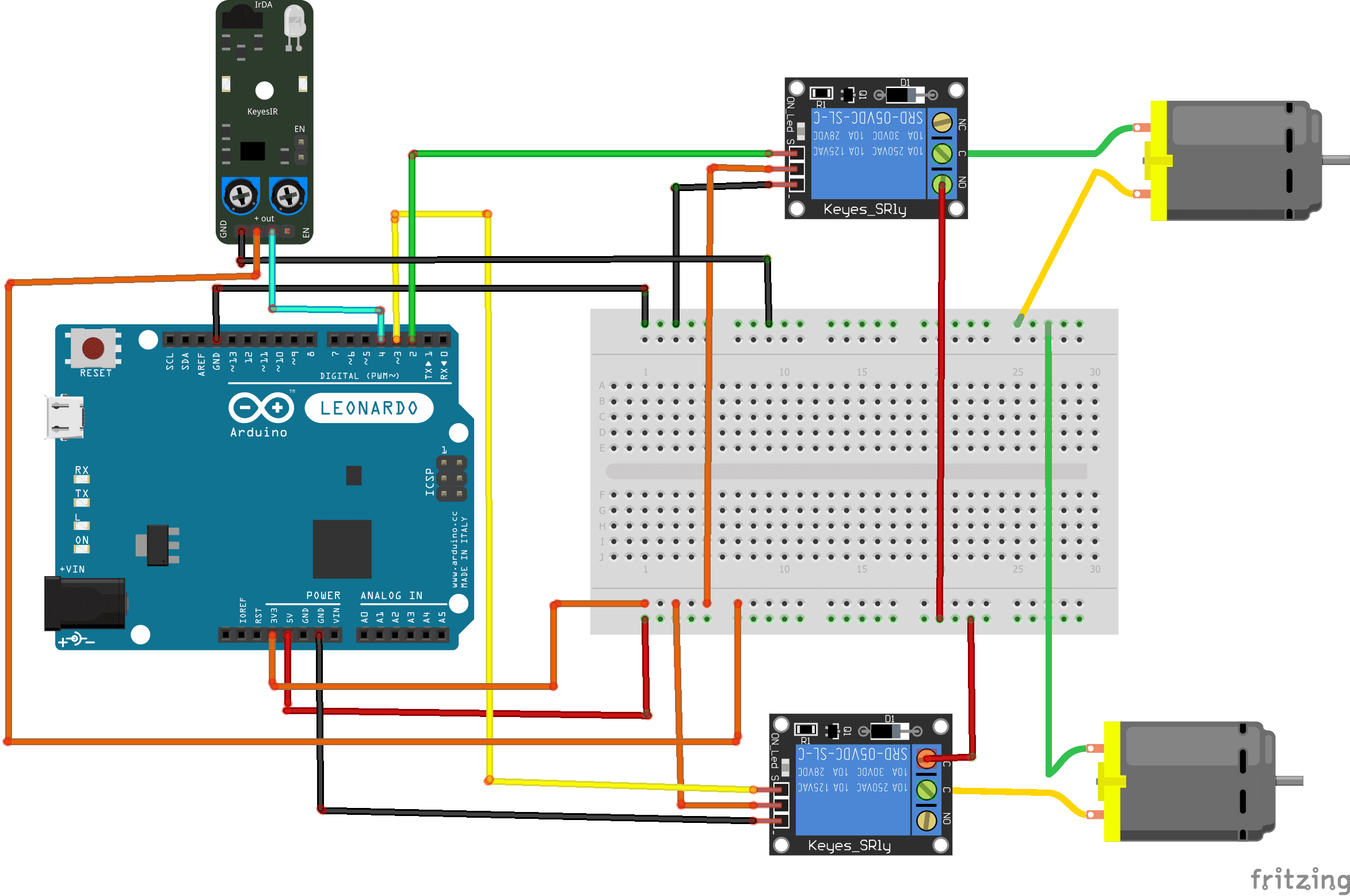
Montage de la voiture avec Arduino
Pour réaliser le montage, on peut connecter
Pour le premier relais:
- la broche S à la borne numérique N°2 de l’Arduino
- la broche (+) à la borne 3.3V de l’Arduino
- la broche (-) à la GND de l’Arduino
- la broche ON à la borne 5V de l’Arduino
Pour le deuxième relais:
- la broche S à la borne numérique N°3 de l’Arduino
- la broche (+) à la borne 3.3V de l’Arduino
- la broche (-) à la GND de l’Arduino
- la broche ON à la borne 5V de l’Arduino
Pour chacun des deux moteurs:
- la première borne à la broche COM du relais
- la deuxième borne à la borne GND de l’Arduino
Pour le capteur infraourge IR:
- la broche OUT à la borne numérique N°4 de l’Arduino
- la broche (+) à la broche 3.3V de l’Arduino
- la broche GND à la GND de l’Arduino
Programme Arduino
Voici le programme pour la carte Arduino connecté à la voiture
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
#include <IRremote.h> int RECV_PIN = 4; IRrecv irrecv(RECV_PIN); // le capteur infrarouge est connecté à broche 4 de l'Arduino decode_results results; const int relais_moteur1 = 2; // // le relais est connecté à la broche 2 de la carte Adruino const int relais_moteur2 = 3; // // le relais est connecté à la broche 3 de la carte Adruino void setup() { irrecv.enableIRIn(); // Initialise le recepteur infrarouge pinMode(relais_moteur1, OUTPUT); pinMode(relais_moteur2, OUTPUT); } void loop() { if (irrecv.decode(&results)) { if (results.value==0xFF18E7)//on appuie sur la touche 2 { digitalWrite(relais_moteur1, HIGH);// la voiture avance digitalWrite(relais_moteur2, HIGH); } if (results.value==0xFF5AA5)//on appuie sur la touche 6 { digitalWrite(relais_moteur1, HIGH); digitalWrite(relais_moteur2, LOW); // la voiture tourne à droite } if (results.value==0xFF10EF)//on appuie sur la touche 4 { digitalWrite(relais_moteur1, LOW); digitalWrite(relais_moteur2, HIGH); // la voiture tourne à gauche } if (results.value==0xFF38C7)// appuie sur la touche 5 { digitalWrite(relais_moteur1, LOW);// la voiture s'arrête digitalWrite(relais_moteur2, LOW); } irrecv.resume(); // Recoit la valeur suivante } } |
Vous pouvez voir aussi



1 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
Safidy 05-07-2222
Je s'inscrire sur votre site. Et suivre vos cours .merci