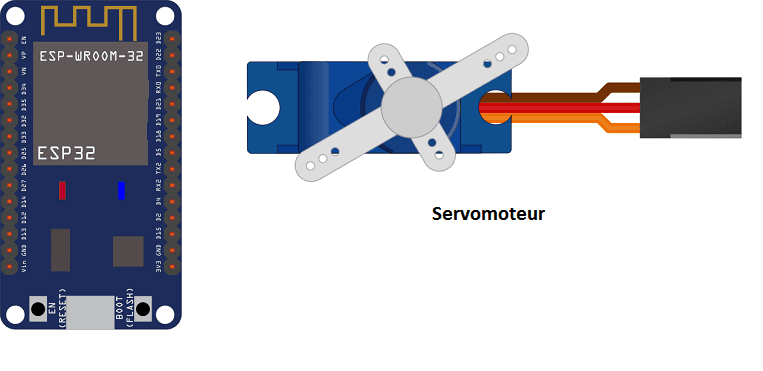
ESP32 Servomoteur
Contrôler un servomoteur avec la carte ESP32
Un servomoteur est un type de moteur électrique qui est spécialement conçu pour être utilisé dans des applications qui nécessitent un contrôle précis de la position angulaire, de la vitesse et de l’accélération. Les servomoteurs sont souvent utilisés dans la robotique, la fabrication et d’autres applications où un contrôle précis du mouvement est nécessaire.
Les servomoteurs sont généralement constitués d’un moteur à courant continu, d’une transmission par engrenages et d’un système de commande de rétroaction. Le moteur à courant continu fournit la force de rotation, tandis que la transmission par engrenages réduit la vitesse et augmente le couple du moteur. Le système de commande de rétroaction est utilisé pour mesurer la position angulaire du moteur et pour ajuster le couple du moteur afin de maintenir la position souhaitée.
Pour utiliser un servomoteur avec la carte ESP32, vous devrez connecter le moteur à la carte et écrire un programme à l’aide de l’environnement de développement micropython pour contrôler le moteur. Pour contrôler le servomoteur, vous devrez envoyer un signal modulé en largeur d’impulsion (PWM) au moteur. La largeur de l’impulsion détermine la position du moteur, avec une impulsion plus large correspondant à un angle de rotation plus important.
But de ce tutoriel:
Dans ce tutoriel on va tester le servomoteur en faisant balayant une plage angulaire dans un sens puis dans l’autre:
- Il se positionne à l’angle 0°
- il se positionne à l’angle 180°.
- on retourne à l’étape 1
Composants nécessaires
carte ESP32

La carte ESP32 est une carte de microcontrôleur basée sur le microcontrôleur ESP32 d’Espressif Systems. C’est une puce système à faible coût et à faible consommation d’énergie conçue pour les applications de l’Internet des objets (IoT).
un servomoteur

Un servomoteur est un moteur électrique qui peut être contrôlé avec précision pour effectuer des mouvements de rotation à un angle spécifique. Ils sont souvent utilisés dans les projets de robotique et de mécanique pour contrôler la position et le mouvement de différents éléments, tels que les bras de robots, les roues de véhicules télécommandés et les mécanismes de verrouillage.
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques. Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
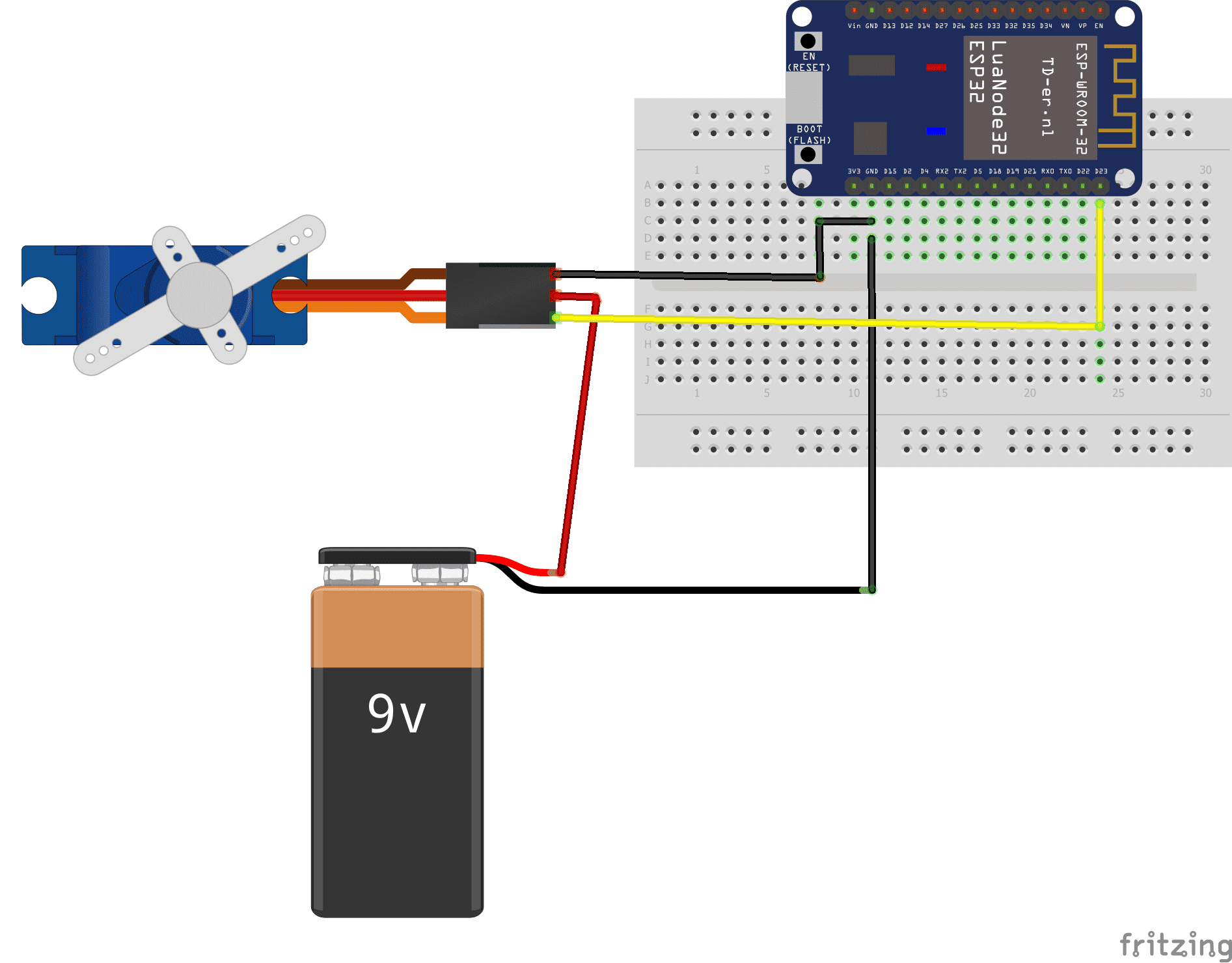
Montage
Le branchement est presque toujours le même et se fera à l’aide de 3 fils dont voici les principales couleurs que vous pourrez rencontrer :
- Rouge : fil de l’alimentation à relier à la borne (+) d’un pile de 9V
- Marron : fil à relier à la broche GND de la carte ESP32
- Jaune : fil de signal de positionnement branché à la broche D4 de la carte ESP32
Programme en micropython
Voici le programme qui permet de contrôler un servomoteur par la carte ESP32.
|
1 2 3 4 5 6 7 8 9 |
import time import machine p4 = machine.Pin(4) servo = machine.PWM(p4,freq=50) # duty for servo is between 40 - 115 while True: servo.duty(30) # tourner le servomoteur à 30° time.sleep(2) # attendre 2s servo.duty(130) # tourner le servomoteur à 180° time.sleep(2) |
Vous pouvez voir aussi


1 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
xnxx movies 03-12-2323
It's acfually a great and ueful piewce of information. I aam satisfied that youu simjply shared this usefu info wth us. Plesase stay us uup to date lijke this. Thanks for sharing.