But de ce projet:
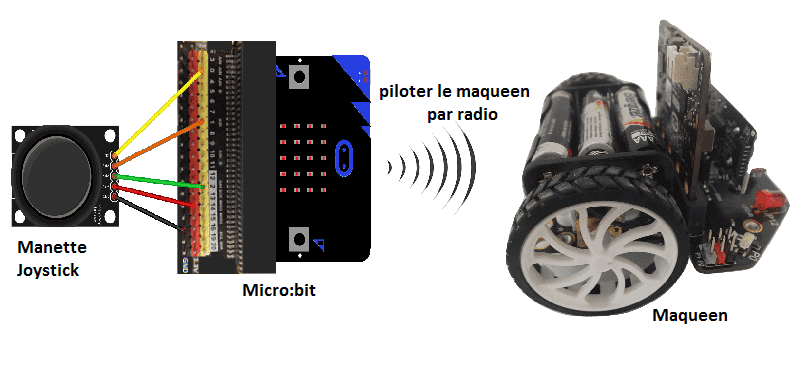
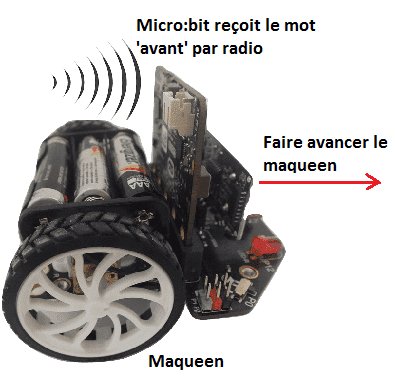
Ce projet a pour but de contrôler le mouvement du Maqueen avec une manette joystick.
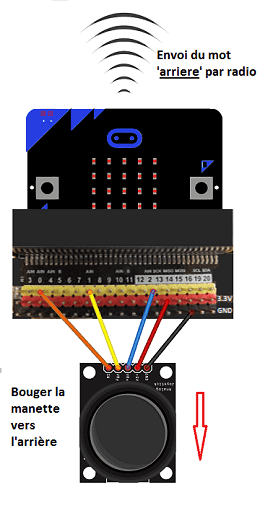
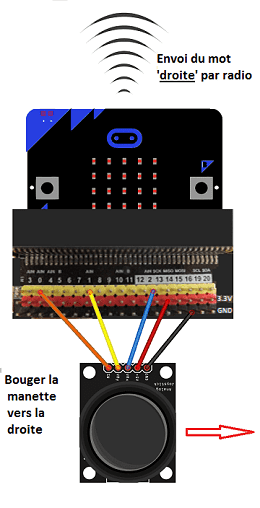
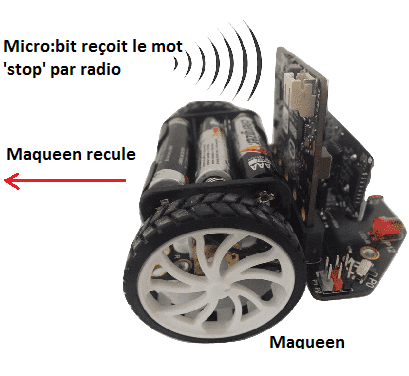
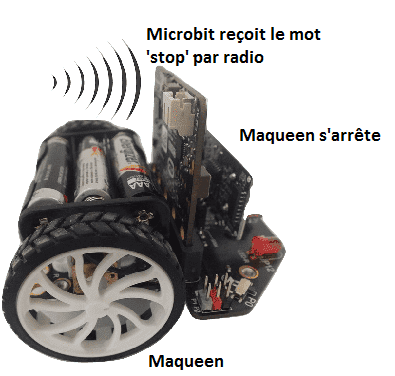
Concernant le joystick, les directions de sa manette permettent au Maqueen d’aller en avant, en arrière, à gauche et à droite. Lorsque la manette prend sa position initiale (point mort) le robot s’arrête.
Grâce à la matrice à LEDs de la carte micro:bit branchée à la manette, on affichera la direction que prend le Maqueen.
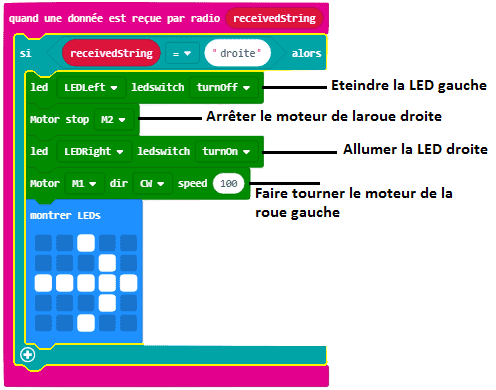
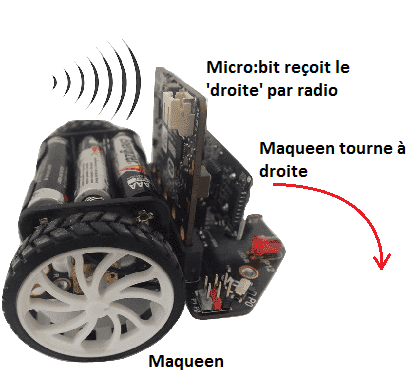
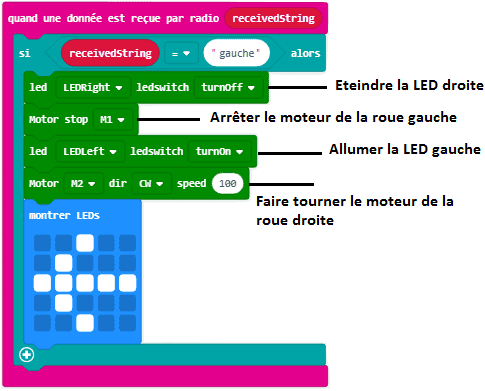
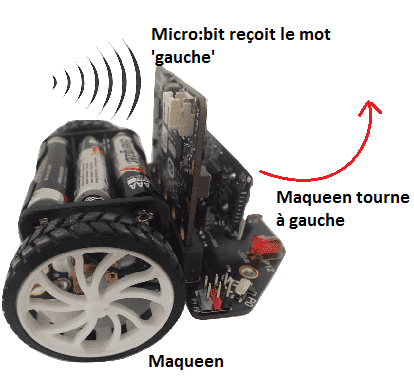
Pour le Maqueen, lorsqu’il tourne à droite, son LED à droite s’allume et lorsqu’il tourne à gauche, son LED à gauche s’allume.
Matériels nécessaires
Il nous faudra deux cartes micro:bit, une pour le robot Maqueen et une pour la manette joystick. De ce fait, il y aura deux programmes.
carte Micro:bit
La carte Micro:bit est une carte de développement de petite taille conçue pour les projets de programmation éducatifs. Elle a été conçue par le BBC et est utilisée dans de nombreux programmes scolaires dans le monde entier. La carte Micro:bit est équipée de nombreux capteurs et périphériques intégrés, ce qui en fait une excellente plate-forme pour les projets de robotique, de capteurs et de création de jeux. La carte Micro:bit est compatible avec de nombreux langages de programmation, y compris Python, C++ et Scratch.
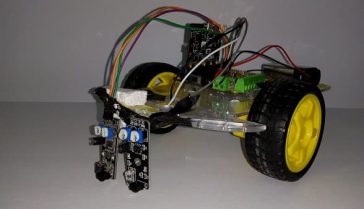
robot Maqueen
Le robot Maqueen est un robot éducatif conçu pour les projets de programmation et de robotique. Il est équipé de deux moteurs et peut être programmé pour se déplacer et effectuer des actions en fonction de la programmation fournie. Le robot Maqueen est équipé d’une carte Micro:bit, qui peut être utilisée pour programmer le robot et lui donner des instructions. De nombreux projets et tutoriels sont disponibles en ligne pour aider les utilisateurs à apprendre à utiliser le robot Maqueen et à créer leurs propres projets de robotique.
manette joystick

Une manette joystick est un périphérique de contrôle utilisé pour piloter un robot. Elle ressemble à une manette de jeu classique, mais elle est conçue spécifiquement pour contrôler les mouvements et les actions d’un robot. La manette joystick peut être utilisée pour naviguer dans l’environnement du robot, contrôler ses mouvements et effectuer des actions précises, comme saisir ou déplacer des objets. Certaines manette joystick sont équipées de sticks analogiques et de boutons de commande pour offrir une plus grande précision de contrôle, tandis que d’autres sont équipées de croix directionnelles et de gâchettes pour un contrôle plus simple. La manette joystick est généralement connectée au robot via un câble ou sans fil via Bluetooth.
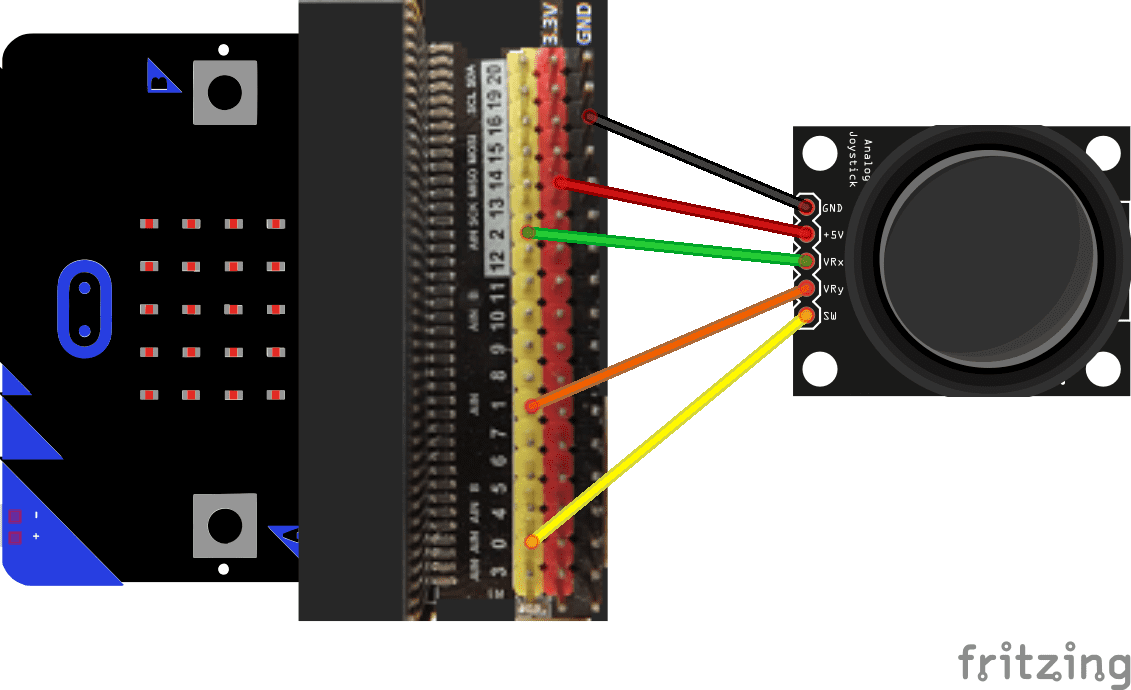
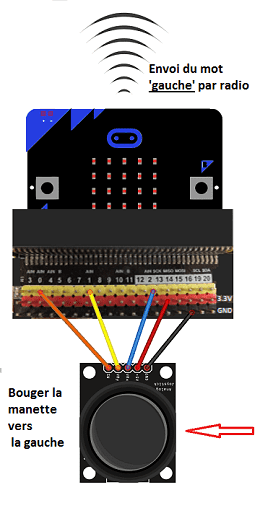
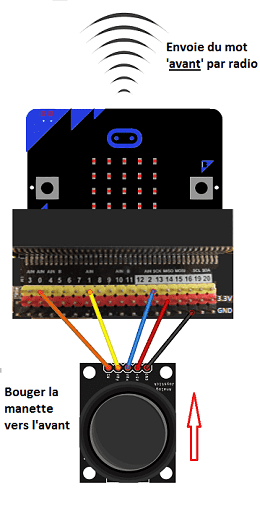
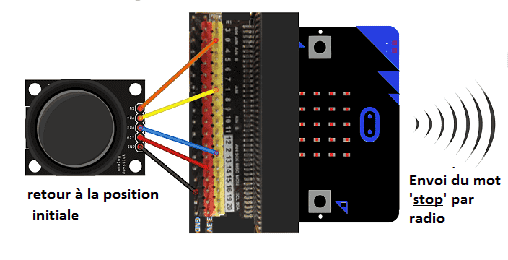
Pour le montage du joystick et micro:bit , on peut connecter:
-
La broche +5V du joystick à 3.3V du micro:bit
-
La broche GND du joystick au GND du micro:bit
-
La broche VRx du joystick au pin P2 du micro:bit
-
La broche VRy du joystick au pin P1 du micro:bit
-
La broche SW du joystick au pin P0 du micro:bit
1er Programme makecode
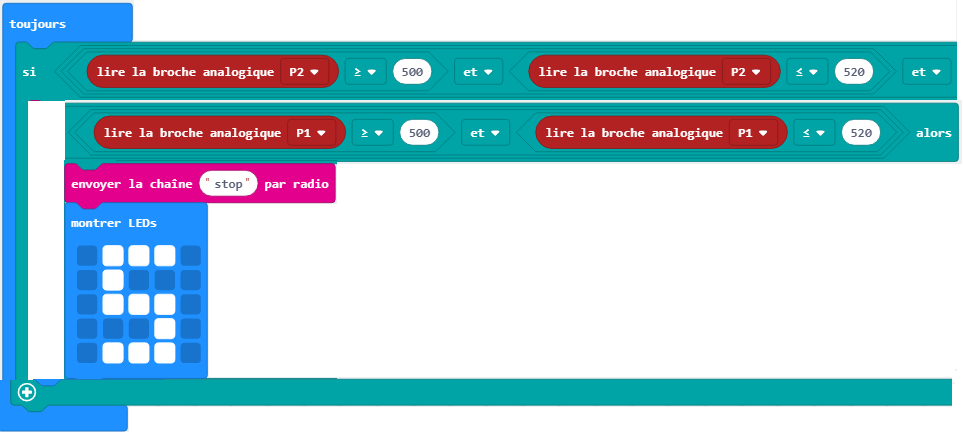
Voici le programme makecode pour le micro:bit branché à la manette joystick :
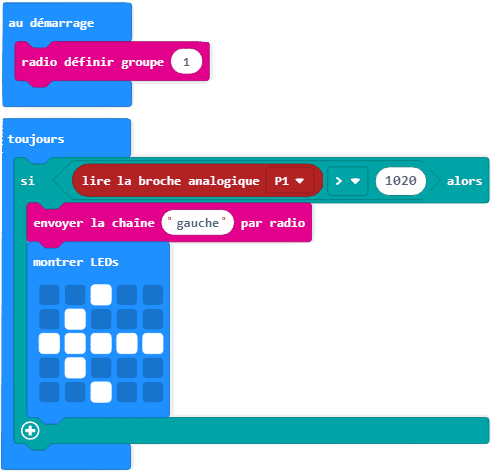
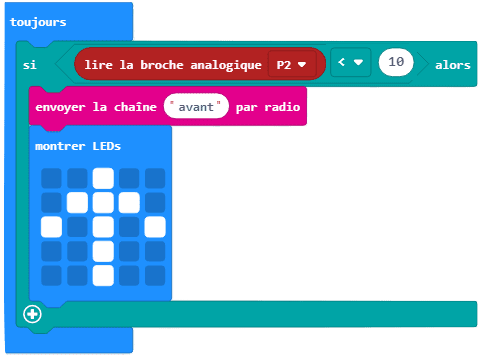
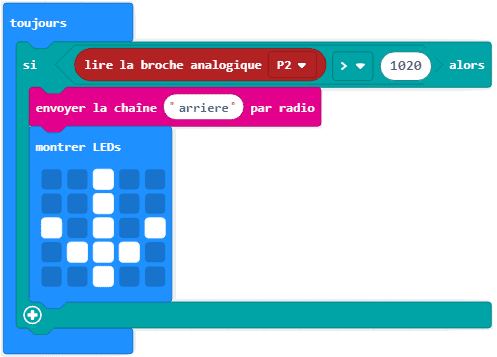
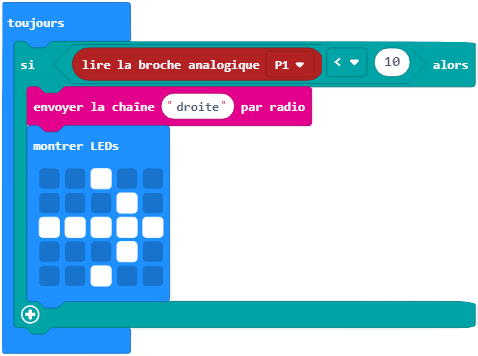
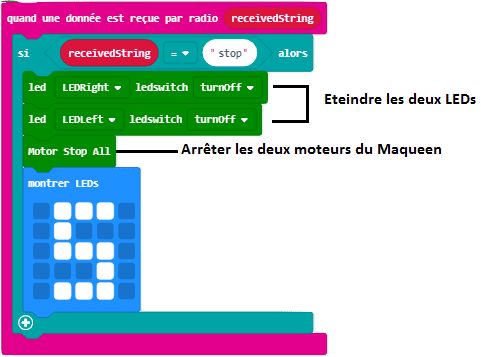
Lorsqu’on la manette joystick revient à sa position initiale (point mort): Les 2 broches P1 et P2 du micro:bit retournent des valeurs entre 500 et 520 et la carte micro:bit envoie par radio le mot ‘stop’ vers la carte micro:bit du Maqueen.
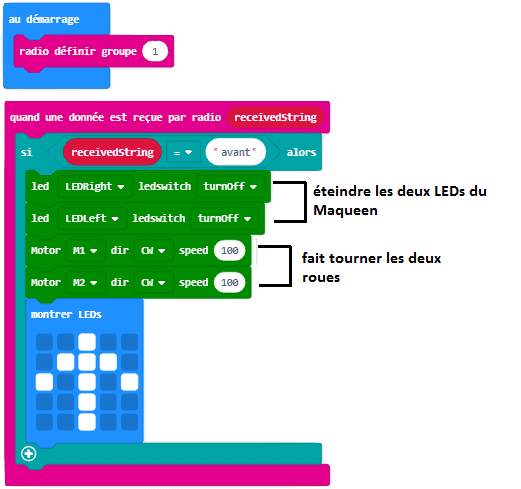
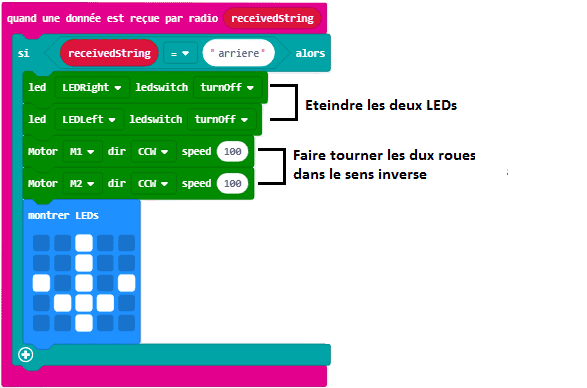
2ème Programme makecode
Voici le programme makecode pour le micro:bit connecté au Maqueen
Vous pouvez voir aussi


0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top