Le robot marcheur expérimental
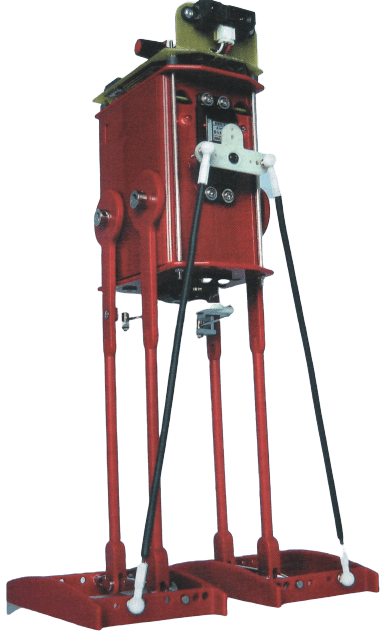
Dans la mythologie scandinave, un «Troll» est un petit être farceur vivant dans les montagnes et les bois. Notre robot marcheur rappelle ce personnage par sa taille et peut-être par sa démarche, d’où le choix de son nom. Comme nous, il est capable de marcher sur deux pattes, ou plutôt sur deux jambes. Il déplace son centre de gravité en levant une jambe et en avançant ou reculant l’autre, un peu comme si nous humains raidissions les genoux pour avancer ou reculer.
De plus, ce robot marcheur est équipé d’un capteur capable de détecter les obstacles à plus de vingt centimètres et de les éviter.
Afin de pouvoir expérimenter, effectuer des tests, donner des ordres de comportement et tout simplement pouvoir communiquer avec lui, nous l’avons muni de deux potentiomètres et trois touches.
Un buzzer piézo émet des sons pour lui permettre de manifester son mécontentement devant un obstacle ou envoyer un accusé de réception. La conception de ce robot serait incomplète sans son chargeur de batteries adapté. Nous vous en proposons un, simple, mais fournissant un courant constant en fonction de la capacité des accumulateurs que vous utiliserez.
Pas d’inquiétude pour la réalisation mécanique! Il s’agit d’un kit livré sans électronique à un coût très attractif. Il est distribué par la société Lextronic, laquelle commercialise le célèbre microcontrôleur CB220 et les servomoteurs qui équipent notre robot marcheur.
Rappel de physique
Il est important de garder à l’esprit le principe de base régissant la marche de l’être humain. Comme le montre la figure 1, le centre de gravité doit toujours se trouver au-dessus d’une surface délimitée par les points de contacts au sol et appelée: polygone de sustentation.
Ce dernier correspond soit à la surface des deux pieds, additionnée de la zone interpodale (entre les deux) s’il se tient sur ses deux pieds, soit simplement celle d’un seul pied si l’un des deux est soulevé. Le corps, ou le robot marcheur, ne peut tenir en équilibre que si le centre de gravité se trouve à la verticale du polygone de sustentation. Faites cette expérience pour illustrer ce propos : adossé à un mur, les jambes raidies, essayez de ramasser un objet à terre situé à 30 cm de vos pieds; c’est impossible, même pour un équilibriste.
Pour compenser le déséquilibre permanent que représente la marche, il est essentiel d’incliner le corps pour recentrer du mieux possible le centre de gravité. C’est ce que fait notre robot marcheur, car les batteries situées dans son corps constituent l’essentiel de son poids. Tout l’art de la marche réside dans ce principe.
Une manœuvre trop brutale ou exagérée et notre « Cyber- Troll » se retrouve lamentablement à terre!
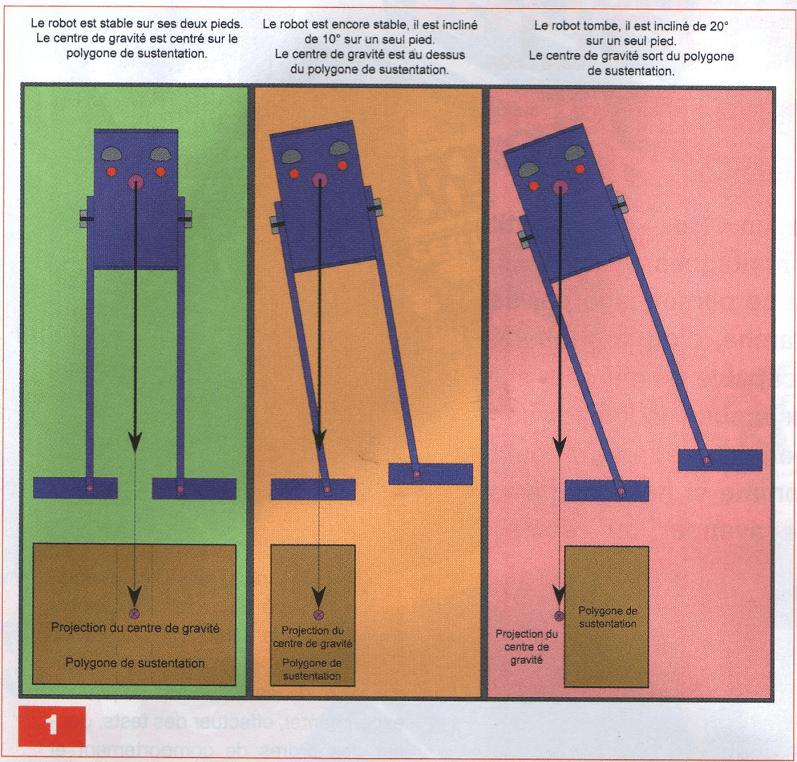
Schéma de principe
La figure 2 donne le schéma de principe très complet, nécessaire à cette étude. Il est scindé en quatre sections bien distinctes: le chargeur de batte-ries, l’alimentation, la platine de commande et le câble de programmation. En robotique, il convient d’accorder un soin tout particulier à la conception de l’alimentation. Celle-ci doit pouvoir fournir la puissance nécessaire à la motorisation sans faillir (les servomoteurs dans notre cas). Elle doit égaIement gérer la tension de +5 V destinée au microcontrôleur quel que soit l’état des batteries (d’environ +6 V en charge maximale à +4 V au minimum). Enfin, elle doit supprimer tous les bruits parasitaires générés par les moteurs. La meilleure solution consiste à utiliser le circuit intégré spécifique LT1300-CN8, bien connu de nos lecteurs. Celui-ci sort une tension de +5 V parfaitement stable quelle que soit celle d’entrée (comprise entre +3 V et +8 V). Autrement dit, il adopte automatiquement le mode « step-up » ou « step-down » en fonction de la tension d’entrée pour obtenir +5 V en sortie. Le circuit CI2 nécessite un nombre restreint de composants périphériques : les deux selfs moulées L 1 et L2, les huit condensateurs C3 à C10 et la diode rapide D7. Les quatre batteries au format des piles « LR6 » ou « AA » sont couplées en deux packs de deux éléments afin de bien répartir les masses (poids) dans le corps du robot marcheur. Les connecteurs à trois broches JB1 et JB2 évitent les inversions des polarités. En ne câblant que deux points, avec le positif au centre, la liaison est correcte, quel que soit le sens d’insertion. Le troisième connecteur (JA 1) permet de raccorder la prise de charge et l’inverseur de mise en service (ou de charge) situés hors du circuit imprimé. Comme pour les deux autres connecteurs, le câblage évite tout risque de court-circuit.
Notre robot marcheur étant expérimental, les alimentations (+ batterie, +5 V et la masse) sont reportées sur des connecteurs femelles de type «tulipe ».
La De12, limitée en courant par la résistance R9, atteste du bon fonctionne¬ment de cette alimentation.
Le schéma de la platine de commande est organisé de manière conventionnelle avec le microcontrôleur CI3 au centre, entouré de ses multiples périphériques. Comme précisé en introduction, nous avons opté pour un Cubloc CB220, bien connu de nos fidèles lecteurs, pour sa facilité de mise en œuvre et ses étonnantes performances. Le connecteur J1F permet de le programmer facilement, à l’aide du câble dont le schéma est proposé dans l’encadré et de le relier simplement au port « sériel» d’un PC, sans avoir recours à un quelconque programmateur complexe et coûteux. Toutes les lignes utiles de CI3 et la broche Rst sont reliées à des connecteurs femelles de type « tulipe -. y compris celles déjà employées à certaines tâches.
La ligne PO utilisée en entrée analogique sert à lire la valeur transmise par le capteur de distance GP20120. Celui-ci retourne une tension inverse-ment proportionnelle à la distance qui le sépare d’un obstacle. Plus cette dernière est courte et plus la tension est élevée.
Les valeurs des deux potentiomètres POTO et POTG sont lues par les deux entrées analogiques P1 et P2.
Les condensateurs C12 et C13 découplent les tensions des curseurs. Ces potentiomètres sont utilisés pour positionner les servomoteurs lors des tests, mais peuvent également servir pour différentes fonctions ou paramétrages selon la programmation.
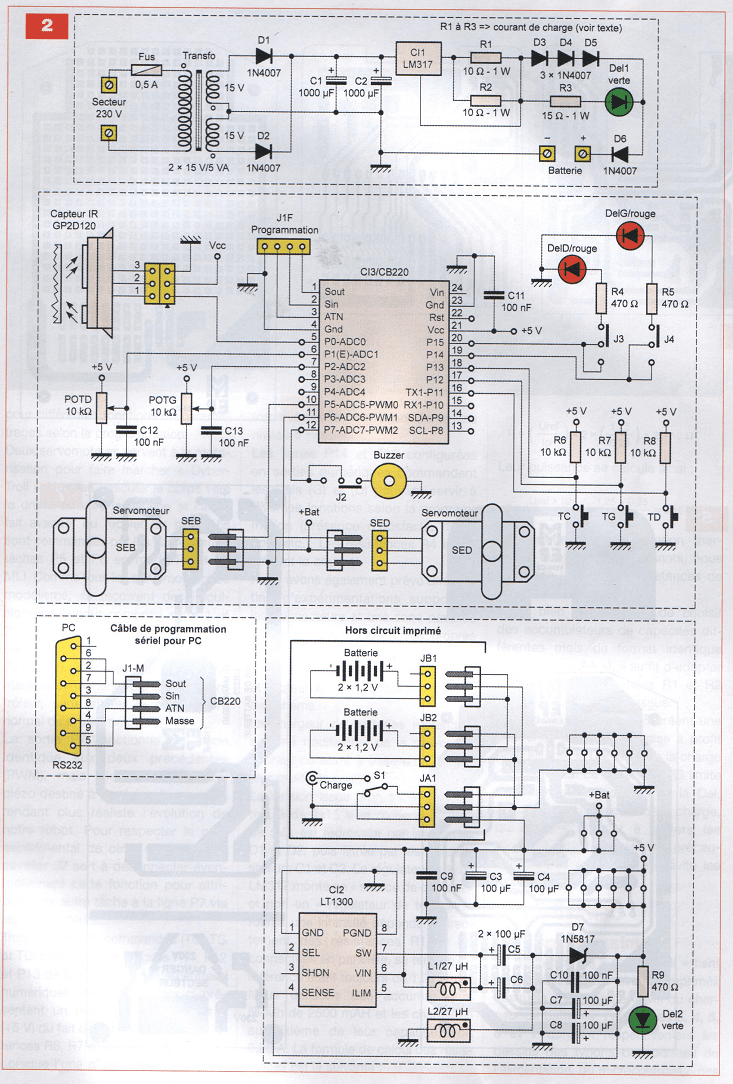
Deux servomoteurs servent à la motorisation pour faire marcher le robot « Cyber-Troll ». L’un fait basculer le corps vers la droite ou vers la gauche et l’autre fait avancer ou reculer les pieds. Ils sont commandés par les sorties multi-tâches P5 et P6 en mode PWM ou MU. Comme tous les servomoteurs de modélisme, ils reçoivent des impulsions de largeur comprise entre 1 et 2 ms à une fréquence approximative de 70 Hz (F = 2304000 / 32768 = 70,31 Hz). Tout ceci est généré de manière permanente par le microcontrôleur, sans altérer le déroulement normal du programme.
La sortie P7 fonctionne de façon identique aux deux précédentes (PWM), mais elle gère un buzzer piézo destiné à produire divers sons, rendant plus réaliste l’évolution de notre robot. Pour respecter le côté expérimental de cette réalisation, le cavalier J2 sert à déconnecter éventuellement cette fonction pour attribuer une autre tâche à la ligne P7 via les connecteurs.
Trois touches de commandes (TC, TG et TO) sont reliées aux lignes P11, P12 et P13 de C13, configurées en entrées numériques. Au repos, celles-ci pré-sentent un niveau logique « haut ” (+5 V) du fait de la présence des résistances R6, R7 et R8.
Lorsque l’une d’elles est activée, elle force l’entrée correspondante au niveau 0 (masse).
Les lignes P14 et P15 configurées en sorties numériques commandent les Dels (G) et (0) pouvant servir à diverses fonctions selon la programmation (présence d’obstacle, direction, etc.). Les résistances R4 et R5 limitent le courant.
Nous avons également prévu une platine d’expérimentations supportant les connecteurs et une zone pastillée destinée à vous livrer à vos propres essais. Elle se substitue à celle des commandes (touches, potentiomètres et capteur) et ne nécessite pas d’étude de schéma.
Le chargeur de batteries reprend le schéma traditionnel de la source de courant constant à base d’un régulateur ajustable positif.
La tension issue d’un transformateur moulé de 2×15 V et d’une puissance de 5VA est redressée par les diodes 01 et 02, puis filtrée par les condensateurs C1 et C2. Le régulateur C11, un LM317 monté en «source de courant” et non en « régulateur de tension “, fournit une intensité dépendant directement des résistances R1 et R2 connectées en parallèle, sa tension de référence étant toujours de 1 ,25 V. Nous utilisons des accumulateurs Ni-Mh de 2500 mAH et les chargeons au dixième de leur capacité, soit 0,25 A.
Les diodes D3, D4 et 05 créent une différence de potentiel mise à profit pour allumer la Del1 lors de la charge des batteries. La résistance R3 limite sensiblement le courant de la Del, mais en aucun cas celui de la charge, qui préfère circuler à travers les diodes. La diode D6 est une précaution un peu superflue, elle évite les retours vers le chargeur.
Je suis un bloc de texte, cliquez sur le bouton \”éditer\” pour me modifier. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
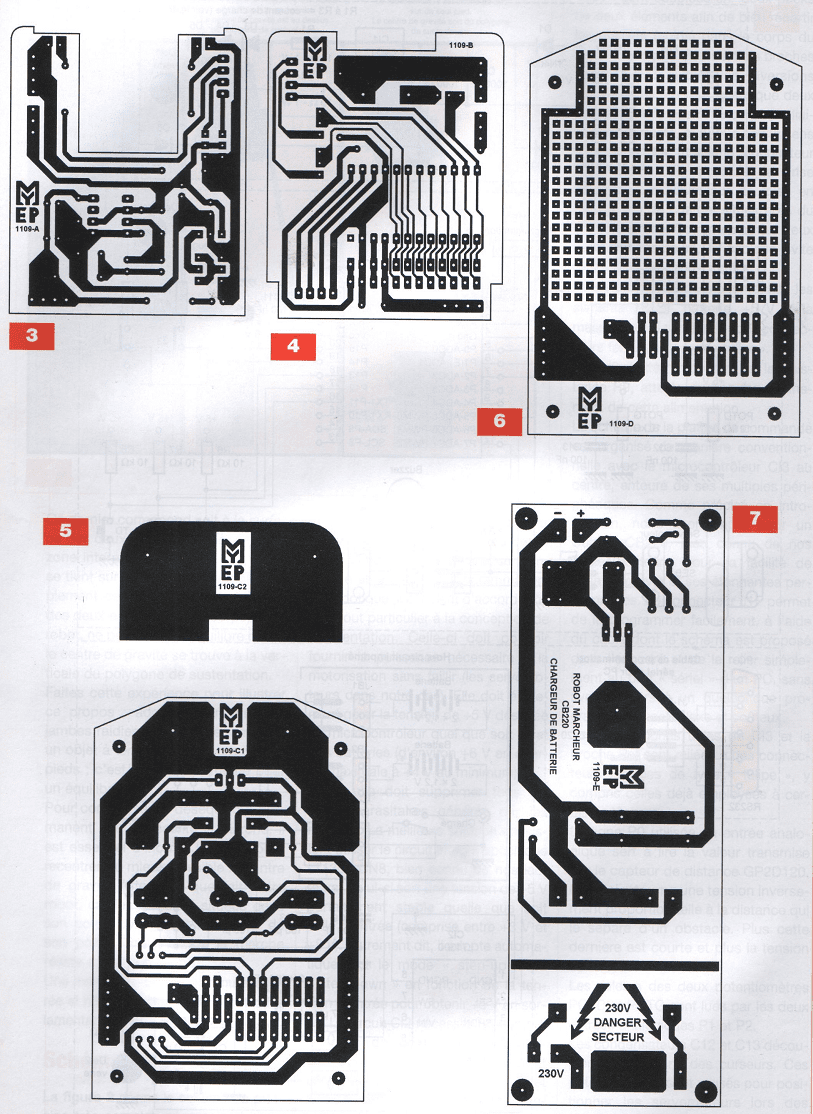
La réalisation
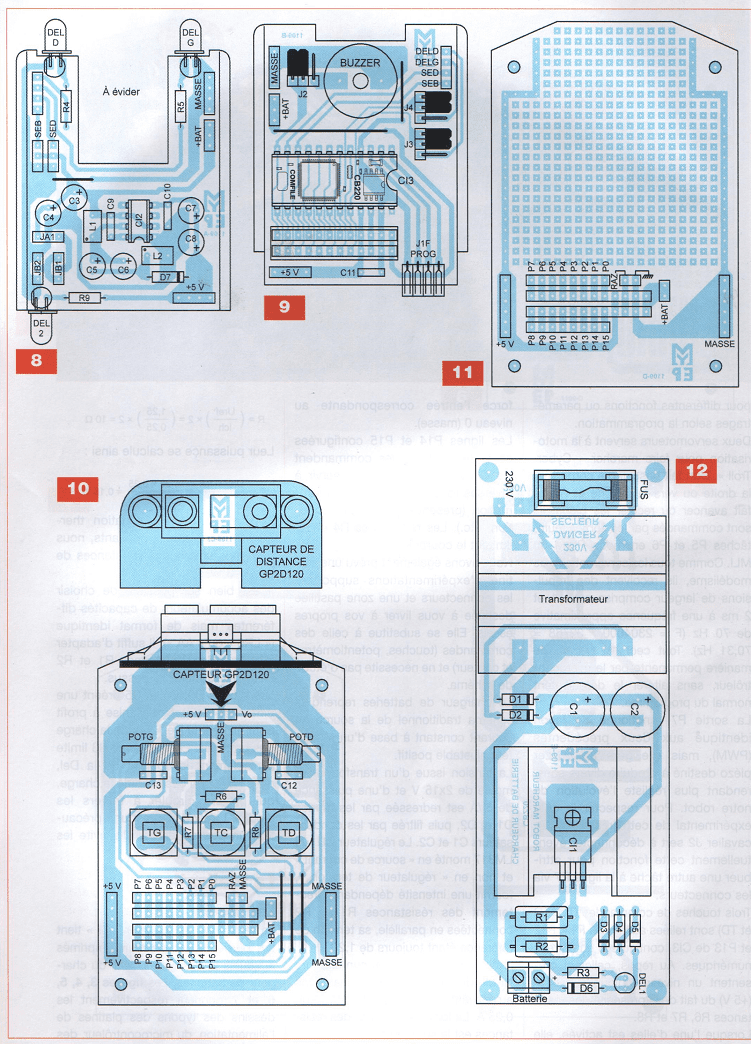
Les circuits imprimés
La réalisation de robot marcheur « Cyber- Troll ” tient sur plusieurs petits circuits imprimés auxquels il faut ajouter celui du chargeur de batteries. Les figures 3, 4, 5, 6 et 7 donnent respectivement les dessins des typons des platines de l’alimentation, du microcontrôleur, des commandes, de la plaque d’expérimentations et enfin du chargeur. Comme toujours, il est recommandé de se procurer l’ensemble des composants avant d’entreprendre la réalisation électronique. Graver les circuits imprimés selon la méthode photographique et percer dans un premier temps toutes les pastilles avec un foret de 0,8 mm de diamètre. Aléser ensuite selon nécessité celles qui sont pré-vues pour les plus grosses pièces. Les plaques doivent être usinées avant l’opération de câblage.
Les découpes s’effectuent à la scie, en pratiquant des trous adjacents. Un ébavurage à la lime douce donne une finition soignée.
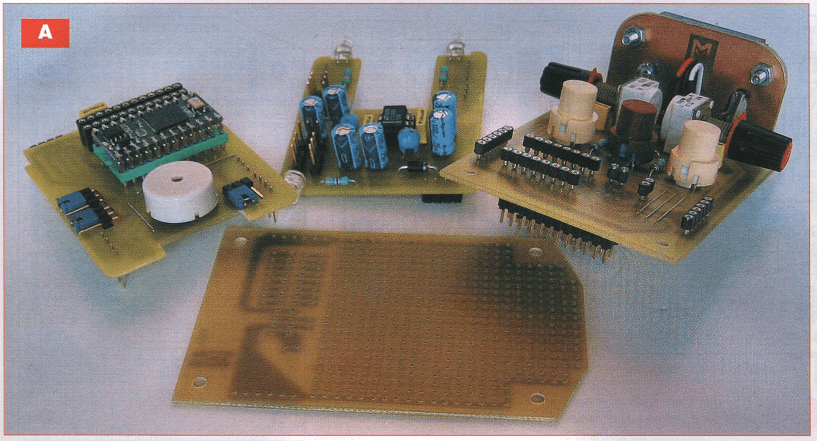
Les modules
Souder les composants simultanément sur toutes les platines ou une par une, selon votre choix, mais en respectant scrupuleusement les plans d’insertions des figures 8, 9, 10, 11 et 12 ainsi que la photo A. Commencer comme toujours par les ponts de liaisons (straps), puis les résistances, les diodes, les supports de circuits intégrés, les cavaliers de configurations insérés sur leurs broches mâles « SIL » coudées, le buzzer, les condensateurs au mylar.
Les Dels inclinées pour traverser au mieux les orifices prévus, les selfs, les borniers à vis, les touches, les potentiomètres, le porte fusible, le régulateur de tension vissé contre son dissipateur thermique, les condensateurs chimiques et pour terminer enfin par le transformateur moulé.
Le capteur GP2D120 est vissé contre une petite plaque, soudée verticalement sur la platine de commandes à l’aide de deux longueurs de fil rigide de section 1,5 mm”.
Les connecteurs JB1, JB2, JA1, SEB, SED sont constitués chacun de trois broches de barrette « sécable » mâle type SIL et sont soudés normalement du côté des composants. Le connecteur de programmation J1F est monté coudé du côté des pistes cuivrées. Les raccordements entre la platine d’alimentation et celle du microcontrôleur s’effectuent à l’aide de connecteurs de type « tulipe », femelles sur la première, mâles sur la seconde, sou-dés du côté des pistes cuivrées. Enfin, les liaisons entre la plaque du micro-contrôleur et celle des commandes sont réalisées toutes deux à l’aide de broches de barrettes « sécable ” femelles, du côté des composants pour la première, sur la face cuivrée pour la seconde.
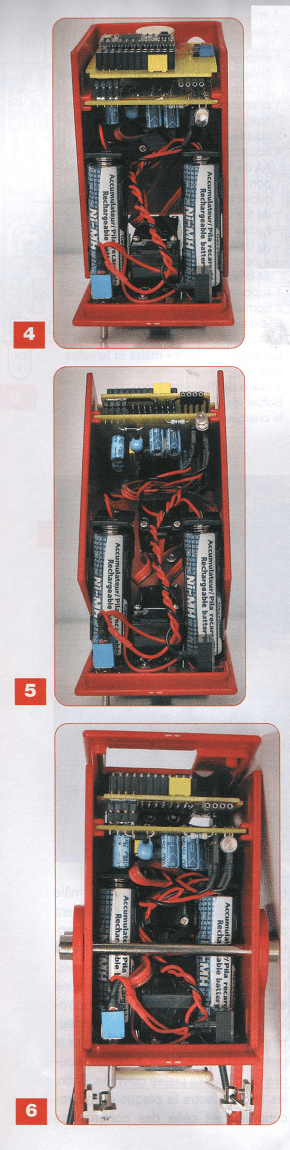
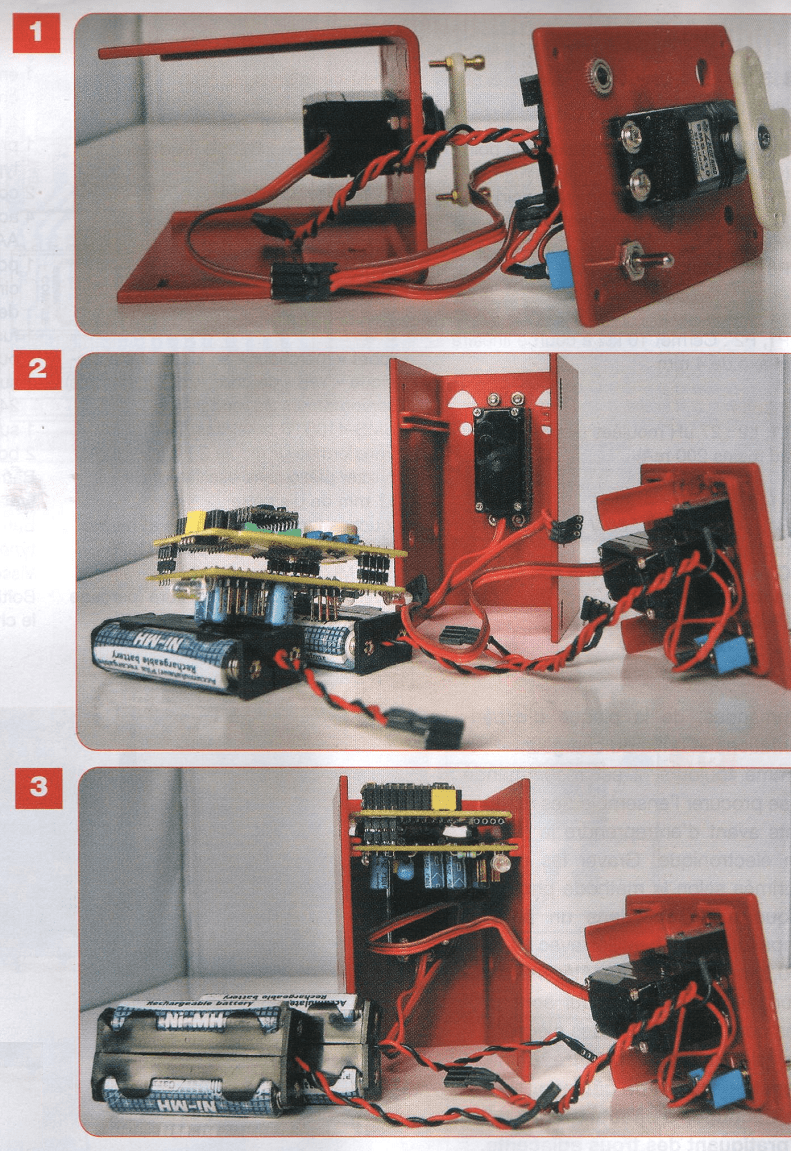
Apporter le plus grand soin aux sou-dures, les pistes étant fines et très proches les unes des autres. Il suffit ensuite d’insérer simplement dans chacune d’elles des broches mâles de même type pour établir les raccords. Attention ! Ces opérations sont sujettes à confusions. Pour les éviter, il est recommandé de bien observer les photos du prototype, étapes de montage 1 à 6.
Effectuer les raccordements des éléments de la batterie, de la prise du chargeur jack 3,5 mm) et de l’inverseur sur les connecteurs femelles JB1, JB2 et JA1. Avant la première mise sous tension, vérifier les pis cuivrées, les soudures ainsi que sens et la valeur des composants. Certaines pistes cuivrées du chargeur de batteries PRÉSENTENT GRAND DANGER car elles Sont soumises au potentiel du secteur est impératif d’enfermer celui-ci dans un boîtier isolant.
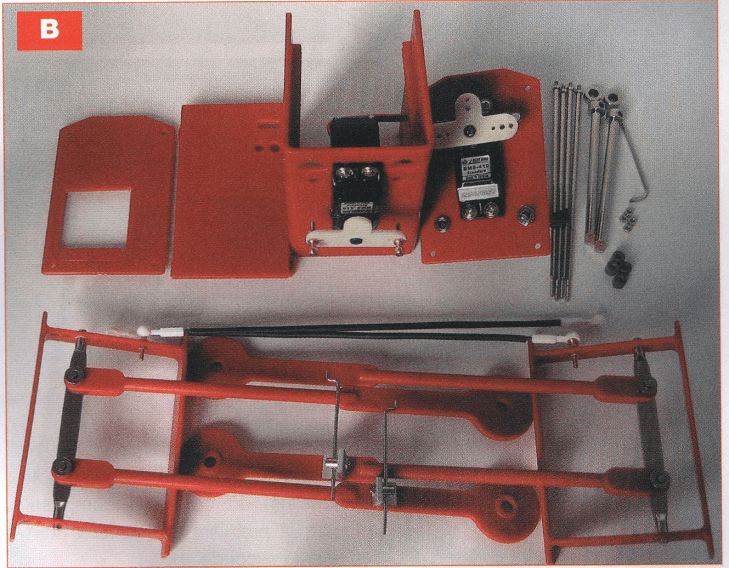
Le kit mécanique
Avant d’assembler le kit mécanique robot (photo B), il convient d’effectuer quelques modifications mineures. De nombreuses photographies montrent les détails et les diverses étal du montage.
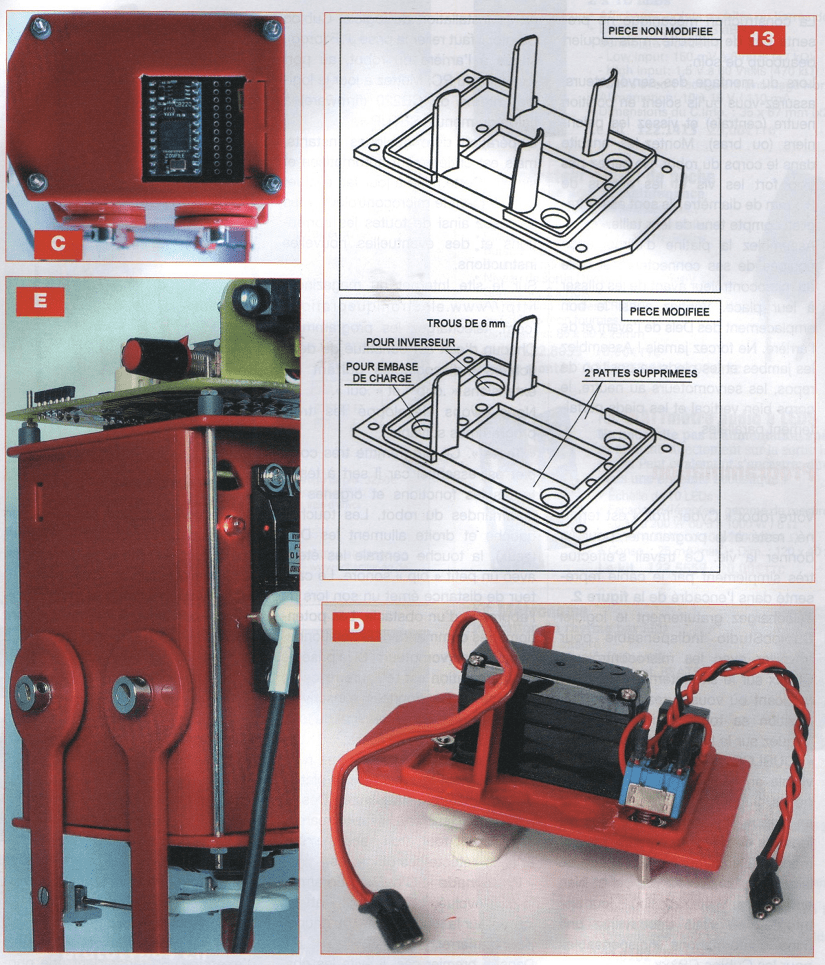
• La plaque supérieure du corps doit comporter une fenêtre au-dessus du connecteur double d’extension et du CB220, celui-ci étant un peu trop haut sur son support. De plus, cet aménagement permet d’insérer celui-ci sur son support sans avoir à démonter le corps (photo C).
• Sur la plaque arrière, il faut pratiquer un petit évidement en regard de la prise de programmation J1F.
• La plaque inférieure supporte les deux packs de batteries. Certains modèles de coupleurs sont trop encombrants, il suffit de supprimer purement et simplement une des deux pattes de maintien (celles vers l’avant) comme le montre la figure 13 et la photo D. Pour loger les batteries et pouvoir fermer le boîtier sans forcer, il peut également être nécessaire de remplacer les connecteurs d’origine, dont sont équipés les servomoteurs, par des modèles moins hauts (trois broches de barrette « sécable » femelle SIL). Isoler convenablement les sou¬dures à l’aide d’une gaine thermorétractable.
• Pour finir, il est préférable de faire un méplat, à la lime, de même largeur que les bagues d’arrêt, sur les extrémités des axes supportant les pattes. Sans ces usinages, les vis s’engagent trop peu dans le filetage (photo E).
La construction mécanique ne pré-sente pas de difficulté, mais requiert beaucoup de soin.
Lors du montage des servomoteurs, assurez-vous qu’ils soient en position neutre (centrale) et vissez les palonniers (ou bras). Montez-les ensuite dans le corps du robot. Ne serrez pas trop fort les vis et les écrous de 2,5 mm de diamètre, ils sont assez fragiles compte tenu de leur taille. Assemblez la platine d’alimentation équipée de ses connecteurs et celle du microcontrôleur avant de les glisser à leur place. Vérifiez aussi le bon emplacement des Dels de l’avant et de l’arrière. Ne forcez jamais! Assemblez les jambes et les pieds en position de repos, les servomoteurs au neutre, le corps bien vertical et les pieds parfaitement parallèles.
Y. MERGY

0 commentaire
Leave a comment


Articles récents

Les casques de moto de demain : quelles avancées technologiques pour une meilleure protection ?
07-11-23
Le futur de la robotique et des ordinateurs : comment la technologie va-t-elle révolutionner nos vies ?
08-03-23
Comment sauver ses cassettes MiniDV ?
09-01-23
Création les applications mobiles avec App Inventor
19-12-22
Articles les plus vus





Articles plus commentés


Scroll to Top