
Detection and tracking of a moving object is a common task in computer vision, and can be accomplished using a variety of techniques. Here are some basic steps involved in detecting and tracking a moving object:
- Image acquisition: The first step is to acquire an image or video feed from a camera. This can be done using a variety of devices, such as webcams, smartphones, or specialized cameras.
- Object detection: The next step is to detect the moving object in the frame. This can be done using techniques such as background subtraction, which involves subtracting a background image from the current frame to highlight the differences (i.e., the moving object). Other methods include optical flow, which tracks the movement of pixels between frames, or deep learning-based object detection algorithms such as YOLO or SSD.
- Object tracking: Once the object has been detected, the next step is to track its movement over time. This can be done using techniques such as Kalman filtering, which uses a mathematical model to predict the object’s future position based on its current state and previous motion. Other methods include correlation tracking, which compares the object’s appearance in the current frame to its appearance in previous frames, or feature-based tracking, which tracks specific features (such as corners or edges) in the image.
- Visualization: Finally, the detected and tracked object can be visualized using various methods, such as drawing a bounding box around the object or highlighting it with a different color.
Some challenges that may need to be addressed when detecting and tracking a moving object include dealing with occlusions (i.e., when the object is temporarily hidden from view), handling changes in lighting or background, and optimizing the tracking algorithm for real-time performance. Additionally, depending on the application, the system may need to be able to track multiple objects simultaneously or track objects across multiple cameras or frames.
Project description :
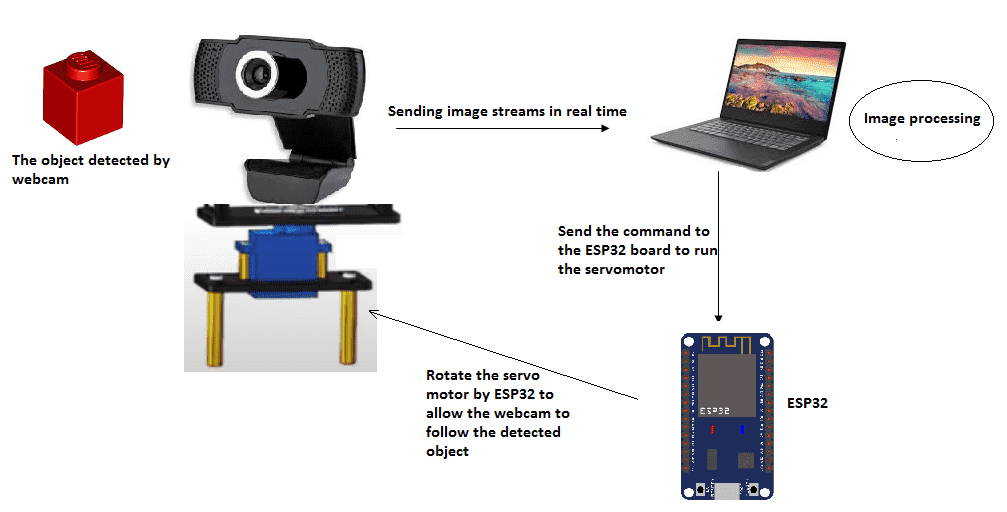
In this project, we are implementing what is called motion detection: that is, we focus on a particular object and we follow its movement by a webcam.
We have created a system to broadcast the images from the webcam to the computer, so we can do post-processing there to detect the object in real time and order the ESP32 card to aim the camera at the object detected at the time. using a servomotor.
You can also see



2 commentaires
Leave a comment


Recent tutorials





Most viewed tutorials





Most commented tutorials




Scroll to Top
penin 24-10-2222
Hello, I am studying to become an engineer and my end-of-year project in need of such a system would it be possible to have some more details?
David 10-12-2121
Hello bro, i want to make a coffee beans sorter with an arduino for control the servo, and a webcam for detect the color of coffee beans. Is it possible sir?