Arduino Servomoteur
Contrôler un servomoteur avec Arduino
Un servomoteur est un moteur électrique à couple élevé qui peut être utilisé pour contrôler la position d’un objet de manière précise. Ils sont souvent utilisés dans les applications de robotique et d’automatisation.
Le servomoteur devrait pivoter de 0 à 180 degrés et retourner à 0 degrés en boucle. Vous pouvez ajuster l’angle de départ et la vitesse de rotation en modifiant les valeurs de “angle” et “delay” dans le programme.
But de ce tutoriel:
Dans ce tutoriel on va tester le servomoteur en faisant balayant une plage angulaire dans un sens puis dans l’autre:
- Il se positionne à l’angle 0°
- il se positionne à l’angle 180°.
- on retourne à l’étape 1
Composants nécessaires
carte Arduino UNO

L’Arduino UNO est une carte de développement microcontrôleur populaire utilisée pour créer des projets électroniques interactifs. Elle est basée sur le microcontrôleur ATmega328 et dispose de 14 broches d’entrée/sortie, de 6 entrées analogiques, de 2 ports série et d’un port USB pour la communication et l’alimentation.
servomoteur

des fils de connexion

Les fils de connexion sont essentiels pour relier les composants électroniques dans un circuit électronique, y compris une carte Arduino. Il existe différents types de fils de connexion en fonction de leur application, comme les fils à gaine thermorétractable, les fils à cosse et les fils tressés.
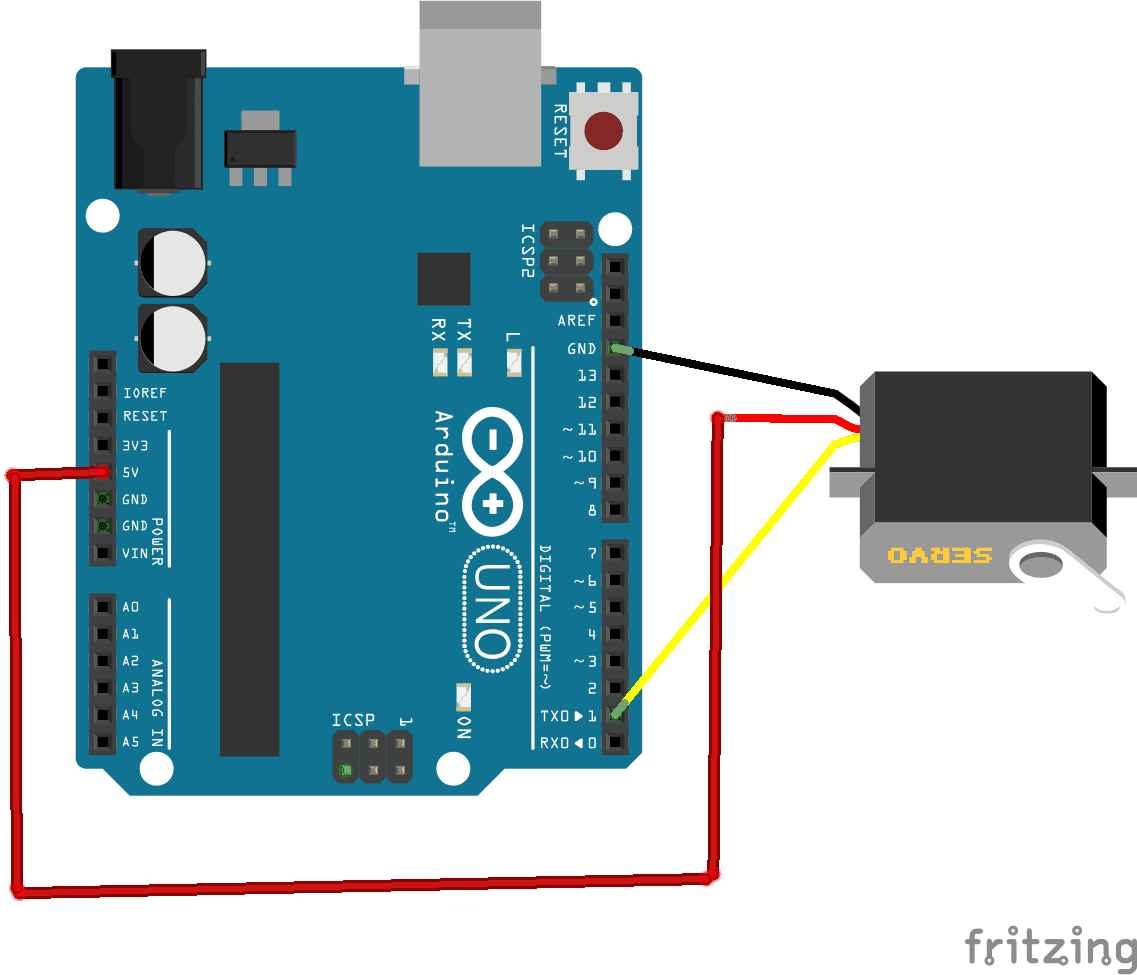
Montage
Le branchement est presque toujours le même et se fera à l’aide de 3 fils dont voici les principales couleurs que vous pourrez rencontrer :
- Rouge : fil de l’alimentation à relier à la broche 5V de l’Arduino
- Marron : fil à relier à la broche GND de l’Arduino
- Jaune : fil de signal de positionnement branché à la borne numérique N°1 de l’Arduino.
Programme Arduino
Voici le programme qui permet de tourner un servomoteur par la carte Arduino.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
/** * Exemple de code pour un servomoteur, il fait faire des va-et-vient à la tête du servomoteur. */ /* Inclut la lib Servo pour manipuler le servomoteur */ #include <Servo.h> /* Créer un objet Servo pour contrôler le servomoteur */ Servo monServomoteur; void setup() { // Attache le servomoteur à la borne numérique PIN 1 monServomoteur.attach(1); } void loop() { // Fait bouger le bras de 0° à 180° for (int position = 0; position <= 180; position++) { monServomoteur.write(position); delay(15); } } |
Vous pouvez voir aussi



0 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top