Afficheur SSD1306 buzzer Capteur de distance ESP32 Projet
Système de détection des obstacles avec la carte ESP32
Système de détection des obstacles:
Un système de détection d’obstacles est un type de dispositif ou de système conçu pour détecter la présence d’obstacles dans une zone particulière. Ces systèmes sont souvent utilisés dans une variété d’applications, notamment la robotique, les véhicules autonomes et les systèmes de sécurité.
Il existe de nombreux types de systèmes de détection d’obstacles, et la méthode spécifique utilisée pour détecter les obstacles peut varier en fonction de l’application. Certaines méthodes courantes de détection d’obstacles comprennent l’utilisation de capteurs tels que l’ultrason, le radar, le lidar ou les capteurs infrarouges. Ces capteurs peuvent être utilisés pour mesurer la distance jusqu’à un obstacle ou pour détecter la présence d’un obstacle dans une plage particulière.
Une fois qu’un obstacle est détecté, le système peut prendre une variété d’actions en réponse. Par exemple, un robot peut être programmé pour s’arrêter et éviter l’obstacle, ou un véhicule autonome peut être programmé pour ralentir ou changer de trajectoire pour éviter l’obstacle. Dans certains cas, le système peut également être programmé pour envoyer une alerte ou un avertissement à l’utilisateur ou à un système de commande central.
But de ce projet:
Dans ce projet on va réaliser un système de détection des obstacles avec la carte ESP32. Ce système utilise principalement un capteur à ultrasons , buzzer et une LED.
Lorsque le capteur à ultrason détecte un obstacle à une distance < 4cm, la carte ESP32 donne l’ordre au buzzer de sonner.
On va donc créer le système de détection d’obstacles en utilisant une carte ESP32 et un capteur de distance HC-SR04. Voici comment cela pourrait être réalisé :
- Tout d’abord, il faut connecter le capteur de distance HC-SR04 à la carte ESP32 en utilisant les broches appropriées. Consultez le manuel du capteur pour connaître les détails de cette connexion.
- Ensuite, il faut écrire du code pour lire les données du capteur de distance HC-SR04 et en déterminer la distance à l’obstacle. Le code doit utiliser les bibliothèques appropriées pour communiquer avec le capteur et interpréter ses données.
- Une fois que vous avez réussi à lire les données du capteur, vous pouvez écrire du code pour effectuer une action en fonction de la distance à l’obstacle. On faire sonner le buzzer si l’obstacle est trop proche, ou envoyer une notification à l’utilisateur si l’obstacle est à une distance dangereuse.
- Enfin, il faut tester le système de détection d’obstacles en le plaçant dans différentes situations et en vérifiant que les actions prévues sont correctement exécutées.
Il est important de noter que la précision et la portée du capteur de distance peuvent varier en fonction du modèle utilisé et des conditions d’utilisation. Il est donc recommandé de tester le système dans différentes conditions pour s’assurer qu’il fonctionne de manière fiable.
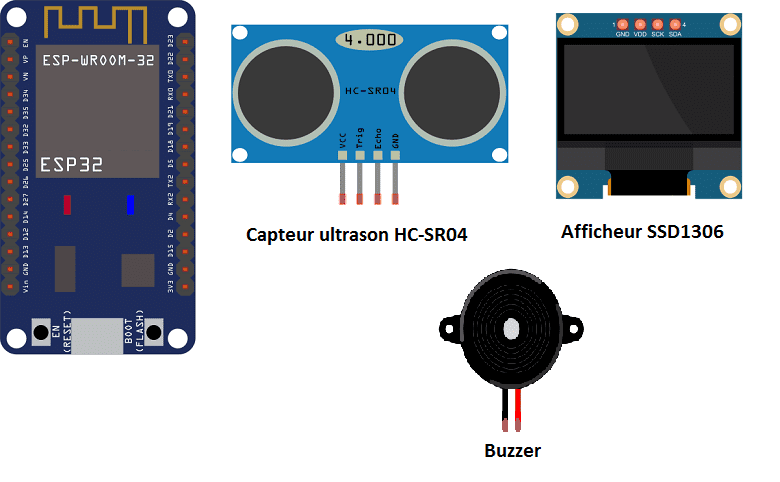
Composants nécessaires
carte ESP32

La carte ESP32 est une carte de microcontrôleur basée sur le microcontrôleur ESP32 d’Espressif Systems. C’est une puce système à faible coût et à faible consommation d’énergie conçue pour les applications de l’Internet des objets (IoT).
capteur sonore HC-SR04
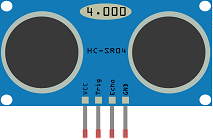
Le capteur HC-SR04 est un capteur de distance ultrasonique couramment utilisé dans les projets électroniques. Il mesure la distance en envoyant un signal ultrasonique et en mesurant le temps qu’il lui faut pour rebondir sur un objet et retourner au capteur. Le capteur HC-SR04 est capable de mesurer des distances allant de 2 cm à 400 cm avec une précision de 3 mm.
Un buzzer
Le buzzer est un dispositif de signalisation électrique qui émet un son de bourdonnement lorsqu’il est activé. Les buzzers sont couramment utilisés dans une variété d’applications, telles que les systèmes d’alarme, les minuteries et les sonnettes de porte.
afficheur SSD1306

Le SSD1306 est un contrôleur d’affichage OLED (diode électroluminescente organique) monochrome qui est couramment utilisé dans les petites applications d’affichage. Les affichages OLED sont minces, légers et économes en énergie, ce qui en fait un choix populaire pour les dispositifs portables et d’autres applications où l’espace et la consommation d’énergie sont un problème.
une plaque d’essai

Une plaque d’essai est un type de carte de développement électronique qui permet aux développeurs de tester et de prototyper facilement des circuits électroniques. Elles sont souvent utilisées par les développeurs pour tester rapidement des idées et des conceptions avant de les intégrer à un projet plus important ou de les intégrer dans une carte de développement plus permanente.
des fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à une carte de développement Arduino. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte Arduino afin de créer des circuits électroniques.
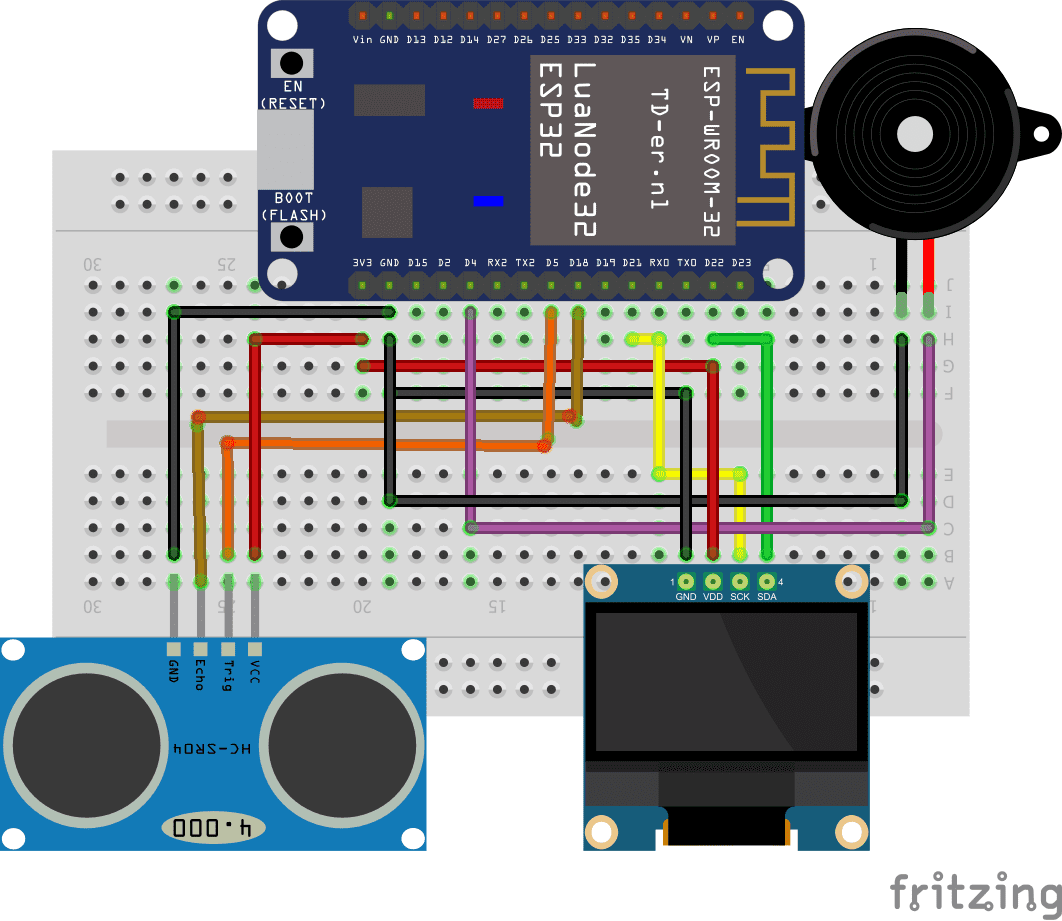
Montage
Pour réaliser le montage, on peut connecter
Pour le buzzer:
- les bornes (+) à la broche D4 de la carte ESP32
- les bornes (-) à la broche GND de la carte ESP32
Pour le capteur HC-SR04:
- la broche TRIG à la broche D5 de la carte ESP32
- la broche Echo à la broche D18 de la carte ESP32
- la broche VCC à la broche VCC de la carte ESP32
- la broche GND à la broche GND de la carte ESP32
Pour l’afficheur:
- la broche SCL à la broche D22 de la carte ESP32
- la broche VCC à la broche 3.3V de la carte ESP32
- la broche GND à la broche GND de la carte ESP32
- la broche SDA la broche D21 de la carte ESP32
Programme en micropython
Voici le programme du système d’alarme sonore :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
from hcsr04 import HCSR04 from machine import Pin,I2C import ssd1306,time i2c = I2C(scl=Pin(22), sda=Pin(21)) #Init i2c oled=ssd1306.SSD1306_I2C(128,64,i2c,0x3c) buzzer=Pin(4,Pin.OUT) sensor = HCSR04(trigger_pin=5,echo_pin=18,echo_timeout_us=1000000) while True: distance = sensor.distance_cm() print(distance,' cm') time.sleep_ms(100) oled.fill(0) oled.text("Distance:",30,20) oled.text(str(distance),30,40) oled.text("cm",30,50) oled.show() # afficher la distance entre le capteur et l'objet if (distance<4): buzzer.value(1) # buzzer sonne else: buzzer.value(0) # buzzer s'arrete de sonner |
Remarque: il faut importer les deux bibliothèques suivantes: hcsr04 et ssd1306
Vous pouvez voir aussi

1 commentaire
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
Henoc 29-11-2323
Capteur ultrason, capter un obstacle, une diode Led s’allume, recevoir notification sur téléphone, ta le choix de d’ouvrir ou fermer le moteur, comment cela peut se faire ?