Arduino Projet voiture
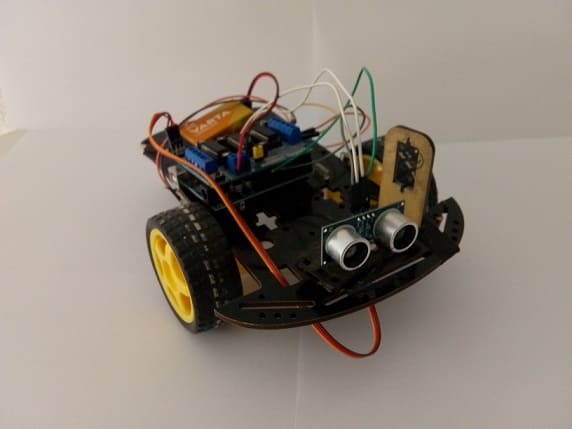
Construction d’un robot commandé par Arduino qui détecte et évite les obstacles
Un véhicule robot est un véhicule automatisé qui utilise des algorithmes de contrôle et de navigation pour se déplacer sans intervention humaine. Les véhicules robots peuvent être utilisés pour des applications telles que la livraison de colis, la reconnaissance et l’inspection, le transport de personnes et la cartographie automatisée. Les véhicules robots peuvent utiliser des technologies telles que la vision par ordinateur, les capteurs GPS et LIDAR pour naviguer de manière autonome.
Les robots qui détectent les obstacles utilisent des capteurs pour percevoir leur environnement et éviter les obstacles en temps réel. Les capteurs couramment utilisés pour détecter les obstacles comprennent le LIDAR, la caméra, le radar et les capteurs ultrasons. Les informations collectées par ces capteurs sont utilisées pour alimenter un algorithme de contrôle du mouvement du robot, qui peut ajuster sa trajectoire en temps réel pour éviter les obstacles. Les robots peuvent également utiliser des techniques de cartographie en temps réel pour construire une carte de leur environnement et planifier une trajectoire sécuritaire pour atteindre leur destination.
Présentation du robot commandé par la carte Arduino qui détecte et évite les obstacles:
Un robot qui utilise une carte Arduino pour détecter et éviter les obstacles peut être construit en utilisant des capteurs d’obstacles tels que des capteurs de distance infrarouges ou des capteurs ultrasons. Les données recueillies par les capteurs sont analysées par la carte Arduino, qui détermine la direction dans laquelle le robot doit tourner pour éviter l’obstacle. Le mouvement du robot peut être contrôlé en utilisant des servomoteurs ou des moteurs DC connectés à la carte Arduino. Le code pour faire fonctionner ce robot peut être écrit en utilisant le langage de programmation Arduino.
Fonctionnement du robot:
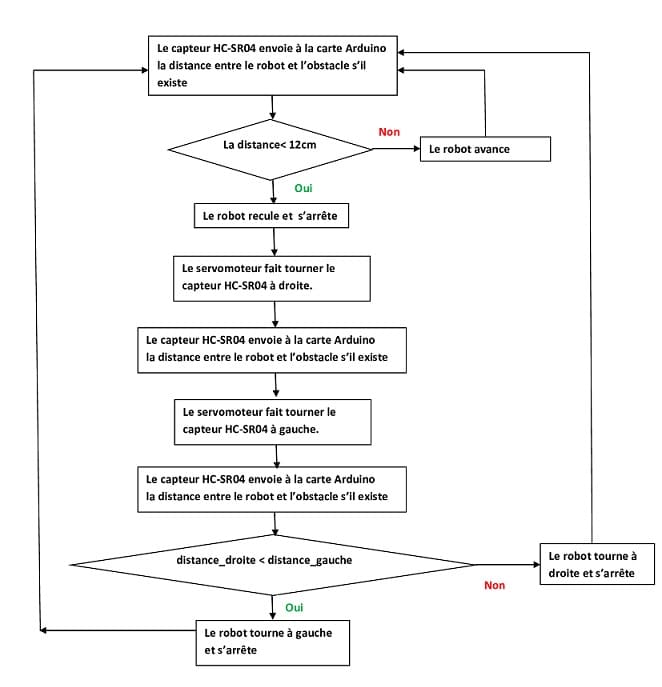
Voici un organigramme général du fonctionnement d’un robot capable de détecter et d’éviter les obstacles commandé par la carte Micro:bit :
- Initialisation : le robot est allumé et les différents composants sont initialisés, notamment les capteurs, les moteurs, et la carte Micro:bit.
- Collecte de données : le capteurs HC-SR04 collecte des informations sur l’environnement du robot, telles que la distance à des obstacles.
- Analyse des données : la carte Arduino analyse les données collectées par les capteurs pour déterminer la présence et la distance d’un obstacle.
- Prise de décision : en fonction des informations collectées et analysées, la carte Arduino décide de la meilleure façon d’éviter l’obstacle.
- Contrôle des moteurs : la carte Arduino envoie des commandes aux moteurs pour effectuer les mouvements nécessaires pour éviter l’obstacle.
- Boucle de contrôle : ce processus est répété en permanence pour permettre au robot de détecter et d’éviter continuellement les obstacles sur son chemin.
Les composants nécessaires
La carte Arduino UNO

L’Arduino UNO est une carte de développement populaire basée sur un microcontrôleur AVR. Il possède 14 broches d’entrée/sortie numériques, 6 broches analogiques, un port série, un port USB et un port de alimentation. Il peut être programmé en utilisant le langage de programmation Arduino et est compatible avec un grand nombre de capteurs et d’accessoires. L’Arduino UNO est souvent utilisé pour des projets de robotique, d’automatisation, d’Internet des objets (IoT) et d’applications d’apprentissage de l’électronique.
Module L293D
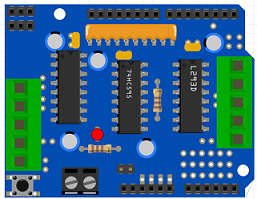
Le module L293D est un driver de moteur bidirectionnel pour alimenter les moteurs DC, les moteurs pas à pas et les moteurs à courant continu. Il peut alimenter jusqu’à 2 moteurs DC avec une tension d’entrée de 4,5 à 36 volts. Le L293D est équipé de 4 broches pour contrôler la direction et la vitesse des moteurs, ainsi que de 2 broches pour alimenter les moteurs. Ce module est souvent utilisé avec des cartes de développement telles que l’Arduino pour contrôler les mouvements des robots et d’autres dispositifs mécaniques.
Le module L293D peut être utilisé pour contrôler les mouvements des robots en utilisant une carte de développement telle que l’Arduino. Le module peut être connecté à la carte Arduino via les broches de commande, tandis que les moteurs du robot peuvent être connectés aux broches de sortie du module. Le code peut être écrit en utilisant le langage de programmation Arduino pour contrôler la direction et la vitesse des moteurs via les broches du module L293D. De cette façon, le robot peut être programmé pour se déplacer dans différentes directions et à différentes vitesses pour accomplir diverses tâches.
Capteur HC-SR04
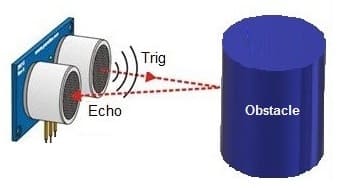
Le capteur HC-SR04 est un capteur de distance ultrasonique utilisé fréquemment dans les projets de robotique pour mesurer les distances à des objets. Il fonctionne en émettant un signal ultrasonique et en mesurant le temps qu’il faut pour que l’écho revienne au capteur. En utilisant la vitesse du son et le temps de voyage aller-retour, le capteur peut déterminer la distance à un objet.
Le capteur HC-SR04 est facile à utiliser et à intégrer dans des projets de robotique, car il dispose de quatre fils : alimentation, masse, déclenchement et écho. Il peut être contrôlé par une variété de contrôleurs électroniques, tels que la carte Arduino.
Les capteurs HC-SR04 sont utiles pour les robots qui doivent éviter les obstacles ou naviguer dans un environnement. Ils peuvent également être utilisés pour détecter les objets en mouvement, pour mesurer les distances à des objets, etc.
En résumé, le capteur HC-SR04 est un capteur de distance ultrasonique utile pour les projets de robotique qui nécessitent une mesure de distance à des objets. Il est facile à utiliser et à intégrer dans des projets grâce à ses quatre fils de connexion simples.
Servomoteur

Les servomoteurs sont souvent utilisés dans les projets de robotique pour contrôler la position et la vitesse de mouvement des objets. Ils peuvent être utilisés pour faire bouger des bras robotiques, des roues, des caméras, etc.
Un servomoteur peut être utilisé pour orienter la direction de détection des obstacles dans un robot détecteur d’obstacles. Le servomoteur peut être relié à un capteur ultrasonique tel que le HC-SR04 pour déterminer la distance à un objet.
Cela permet de couvrir une zone plus large et de fournir des informations plus complètes sur l’environnement de l’objet.
Lorsque le robot se déplace, le servomoteur peut être programmé pour faire pivoter le capteur ultrasonique dans différentes directions pour détecter les obstacles dans son environnement.
Moteur à courant continu de 5V

Un moteur à courant continu (CC) de 5 volts est un moteur électrique qui fonctionne à une tension de 5 volts. Les moteurs DC sont des moteurs qui utilisent un courant continu pour fonctionner et qui peuvent être alimentés par une variété de sources, notamment des piles, des panneaux solaires et des alimentations électriques.
Le module L293D et la carte Arduino peuvent être utilisés ensemble pour contrôler des moteurs à courant continu (DC) dans un robot. La carte Arduino peut être utilisée pour concevoir et exécuter le programme de contrôle du robot, tandis que le module L293D peut être utilisé pour contrôler la vitesse et la direction des moteurs. Les informations collectées à partir de capteurs de détection d’obstacles peuvent être utilisées pour ajuster la vitesse et la direction des moteurs en temps réel. Les moteurs à courant continu peuvent alors être utilisés pour faire avancer ou tourner le robot. Ce genre de configuration permet d’obtenir un robot autonome capable de se déplacer et d’éviter les obstacles rencontrés.
Les moteurs à courant continu de 5V sont disponibles en différentes tailles et puissances pour répondre à vos besoins en matière de performance. Ils peuvent être utilisés pour faire tourner des roues du robot.
Batterie de 9V

Une batterie de 9 volts est une pile qui fournit une tension de sortie de 9 volts. Elles sont souvent utilisées dans les appareils électroniques portables tels que les radiodiffuseurs, les jouets et les outils électroniques. Elles sont également couramment utilisées dans les applications de bricolage et de loisir, telles que les circuits électroniques et les projets de robotique.
Fils de connexion

Les fils de connexion sont des fils électriques utilisés pour connecter des composants électroniques à la carte Arduino. Ils sont généralement utilisés pour connecter des capteurs, des actionneurs, des afficheurs et d’autres composants à la carte Arduino afin de créer des circuits électroniques.
Il existe deux types de fils de connexion: les fils de connexion mâle-mâle et les fils de connexion mâle-femelle. Les fils de connexion mâle-mâle sont utilisés pour connecter des composants qui ont tous deux des broches mâles, tandis que les fils de connexion mâle-femelle sont utilisés pour connecter des composants avec une broche mâle et une broche femelle.
Les fils de connexion sont généralement fabriqués en cuivre ou en alliage de cuivre et sont revêtus d’un isolant en plastique pour protéger les fils électriques et empêcher les courts-circuits. Ils sont disponibles dans une variété de couleurs pour aider à identifier et organiser les différents fils dans un circuit.
Kit robot voitures de 2 roues

Un kit robot voiture à deux roues est un ensemble de pièces et de composants qui permet de construire un robot mobile à deux roues. Ces kits sont généralement destinés aux débutants en robotique et sont conçus pour être faciles à utiliser et à assembler.
Les kits robot voiture à deux roues comprennent généralement un châssis de robot, des roues et des moteurs pour propulser le robot, ainsi qu’un contrôleur de moteur et un microcontrôleur pour commander le robot. Ils peuvent également inclure des capteurs et des modules de communication pour permettre au robot de naviguer et de détecter son environnement.
Pour utiliser un kit robot voiture à deux roues, il faut d’abord assembler le robot en suivant les instructions du manuel. Une fois le robot assemblé, vous pouvez le programmer pour qu’il effectue différentes tâches, comme suivre une ligne, éviter des obstacles ou se déplacer vers un emplacement précis.
Les kits robot voiture à deux roues sont une excellente introduction à la robotique et peuvent être utilisés pour enseigner la programmation et la robotique de manière interactive et ludique. Ils sont également idéaux pour les projets de loisirs et pour la création de robots de compétition.
Le kit robot utilisé dans ce projet est composé de :
- châssis de voiture.
- 2 moteurs à engrenages
- 2 pneus de voiture
- 1 roue universelle
Pour assembler les composants du kit robot, vous pouvez voir cette vidéo.
Montage du robot
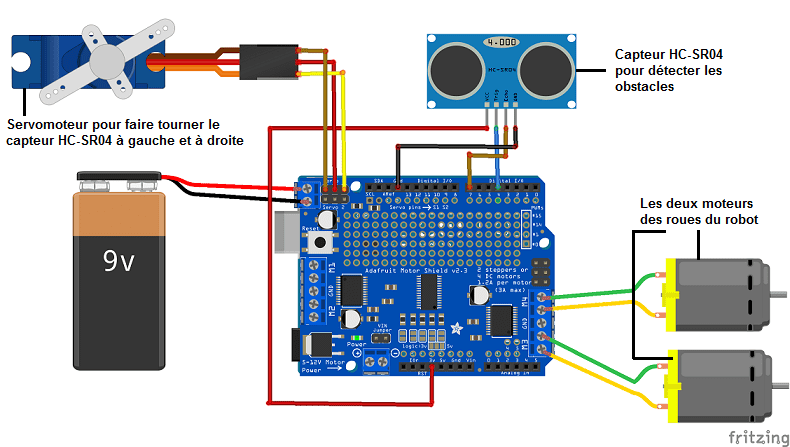
1- Pour le capteur HC-SR04 on connecte
- La borne GND du capteur à la broche GND de la carte Arduino
- La borne VCC du capteur à la broche 3.3V de la carte Arduino
- La borne ECHO du capteur à la broche N°7 de la carte Arduino
- La borne TRIG du capteur à la broche N°4 de la carte Arduino
2- On branche le module L293D à la carte Arduino
3- On connecte le servomoteur au module L293D
Programme Arduino
Voici le programme du robot commandé par la carte Arduino UNO qui détecte et évite les obstacles en utilisant un capteur de distance à ultrasons.
Il faut importer ces deux bibliothèques : hcsr04 et AFMotor
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 |
#include <HCSR04.h> #include <AFMotor.h> #include <Servo.h> Servo myservo; // create servo object to control a servo AF_DCMotor motor1(3); // connecter les deux moteurs des roues du robot au module L293D AF_DCMotor motor2(4); // definition des broches du capteur HC-SR04 const int trigPin = 4; const int echoPin = 7; int distance,distance_droite,distance_gauche; int pos; // initialisation du capteur avec les broches utilisees. UltraSonicDistanceSensor distanceSensor(trigPin, echoPin); void setup() { myservo.write(90); // tell servo to go to position 90 myservo.attach(10); // attaches the servo on pin 10 to the servo object motor1.setSpeed(100); motor2.setSpeed(100); // initialisation du port serie a 9600 band pour afficher les valeurs mesurees par le capteur. Serial.begin(9600); } void loop() { distance = distanceSensor.measureDistanceCm(); Serial.println(distance); delay(50); if ((distance<15)and(distance>0)){ // le capteur HC-SR04 détecte un obstacle motor1.run(RELEASE); // le robot s'arrete motor2.run(RELEASE); delay(500); motor1.run(BACKWARD); // le robot recule motor2.run(BACKWARD); delay(500); motor1.run(RELEASE); // le robot s'arrete motor2.run(RELEASE); for (pos = 90; pos > 10; pos -= 1) { // Faire tourner le capteur HC-SR04 vers la droite myservo.write(pos); delay(15); } delay(500); distance_droite = distanceSensor.measureDistanceCm(); // calculer la distance entre le capteur HC-SR04 et un obstacle s'il existe delay(500); for (pos = 0; pos < 170; pos += 1) { // Faire tourner le capteur HC-SR04 à gauche // in steps of 1 degree myservo.write(pos); delay(15); } delay(500); distance_gauche = distanceSensor.measureDistanceCm();// calculer la distance entre le capteur HC-SR04 et un obstacle s'il existe delay(500); for (pos = 170; pos > 90; pos -= 1) { // retour à la position initiale myservo.write(pos); delay(15); delay(500); } if (distance_droite<distance_gauche){ motor2.run(FORWARD); // faire tourner le robot à gauche delay(1000); motor2.run(RELEASE); delay(500); } else { motor1.run(FORWARD); // aire tourner le robot à droite delay(1000); motor1.run(RELEASE); delay(500); } } else if (distance>0) { motor1.run(FORWARD); // faire avancer la voiture motor2.run(FORWARD); } } |
Vous pouvez voir aussi



4 commentaires
Laisser un commentaire


Tutoriels récents





Tutos les plus vus





Tutos les plus commentés




Scroll to Top
Céleste yao 03-12-2323
Svp monsieur ou madame comment insérer une commande vocale pour l'améliorer
Doc 17-11-2323
quand on annonce un programme,on le donne complet et opérationnel;j'en ai soupé des donneurs de leçon;qui poussent à se dégouter de la programmation.A bon entendeur Salut!
Heni 25-06-2323
Programme complet en block svp
Sihem 16-04-2323
Programme complet svp